
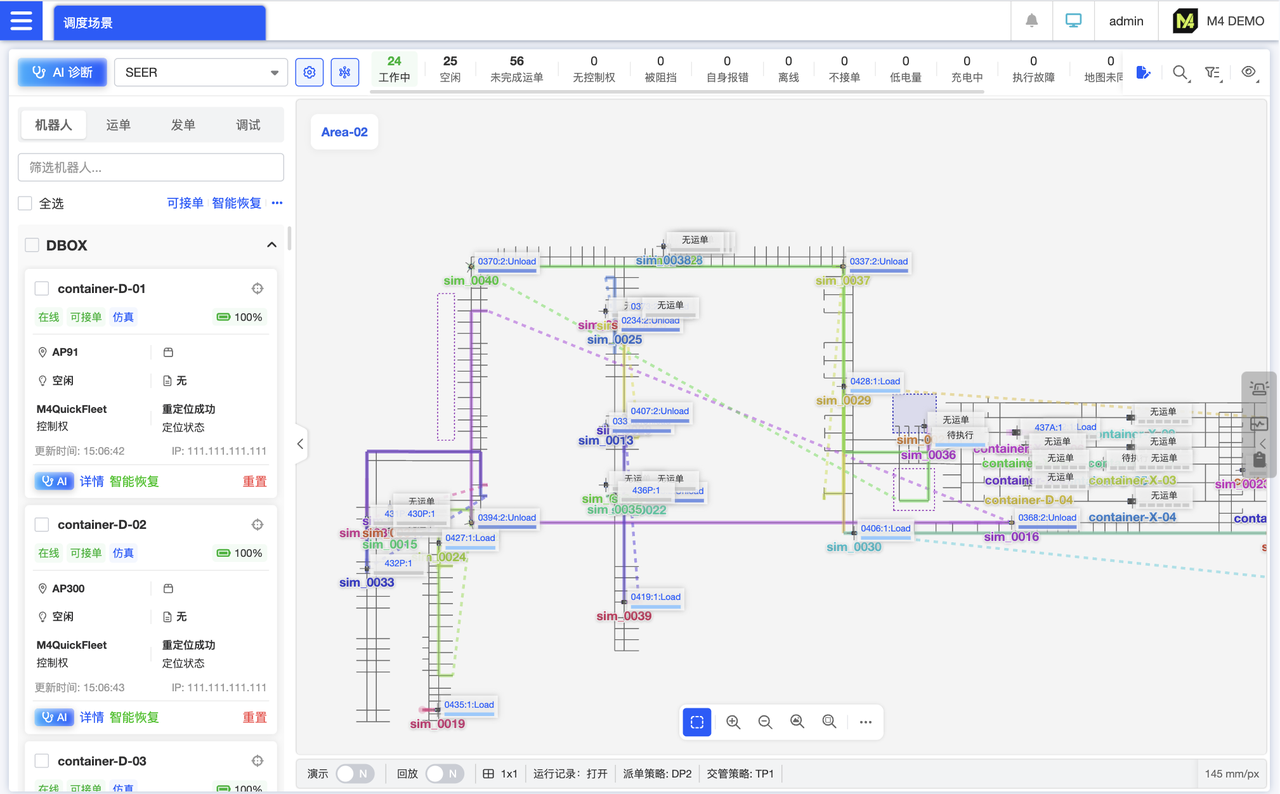
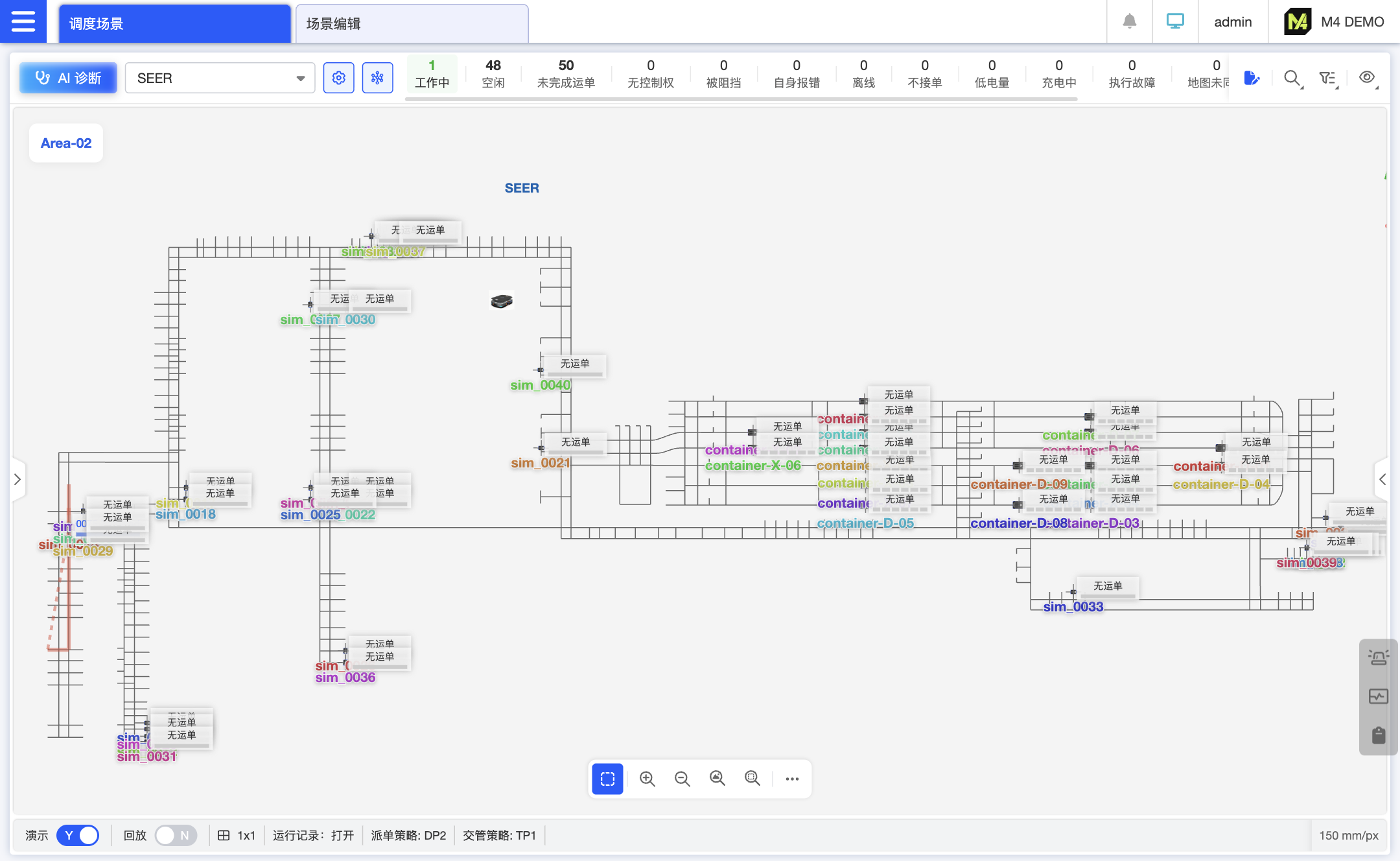
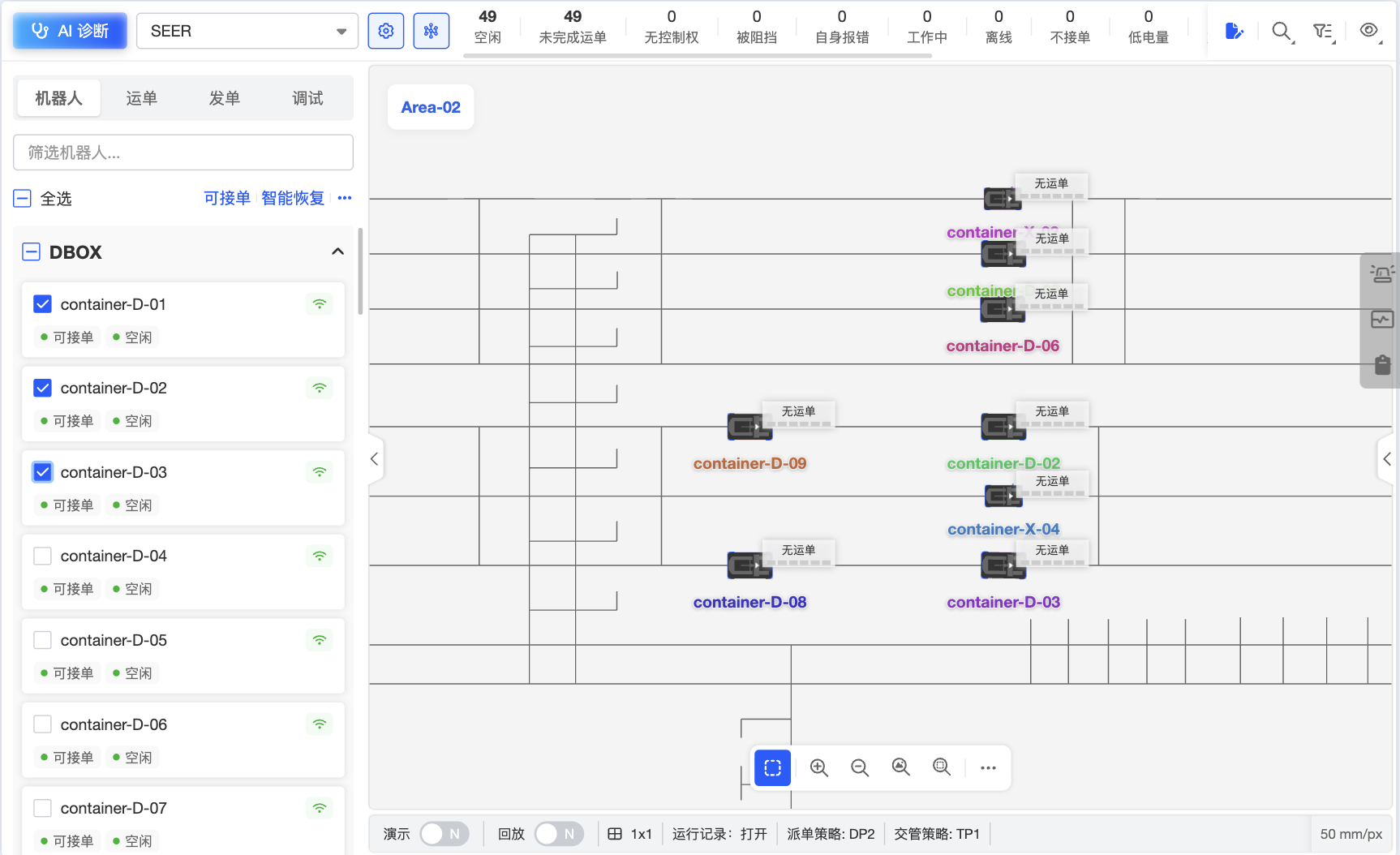
调度总体运行界面:顶部为场景切换下拉框和机器人、场景状态统计栏;左侧机器人卡片纵向排列,直观查看机器人关键信息;中间的地图区域显示场景整体的分布、机器人实时位置、任务执行路径及区域;底部状态栏呈现调度核心参数。全局掌握整体调度状态。
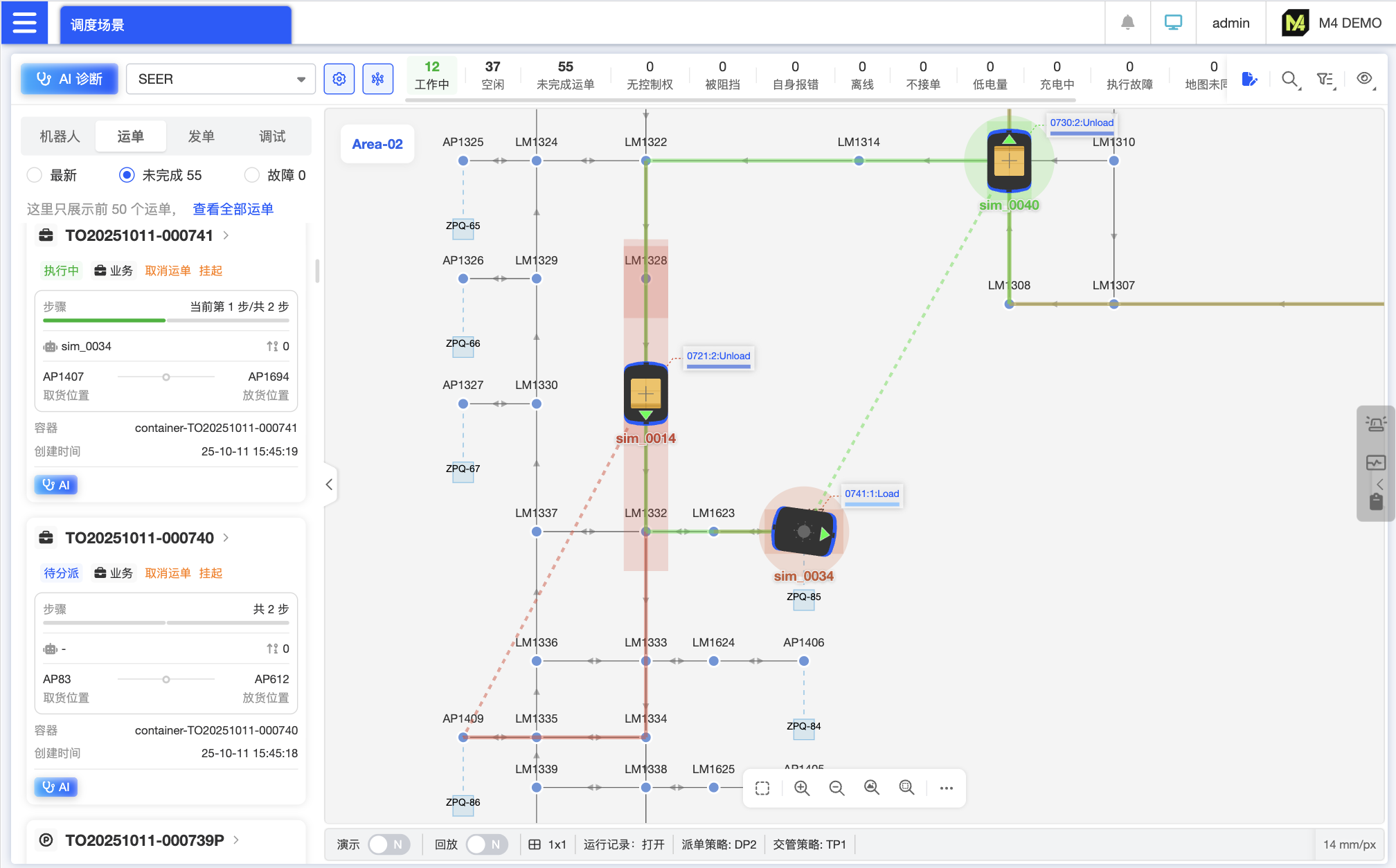
将调度总体运行界面的地图放大,可以看到更细节的机器人运输情况,每个机器人身上有箭头表示车头方向。机器人有空载和载货两种形态,当机器人取货结束,机器人身上将会显示货物标记,在图中表现为黄色的货物。机器人在执行运单过程中,机器人右上角的卡片上,会显示机器人当前正在执行的运单编号。
各个机器人在执行过程中,目标指示线一直连通到终点,且机器人底部和行走方向前有带机器人主题色和透明度的多边形,标识其在路径上占用的交管资源。通过这些标记,我们能直观查看各机器人的目标和调度此时进行的交管规划。
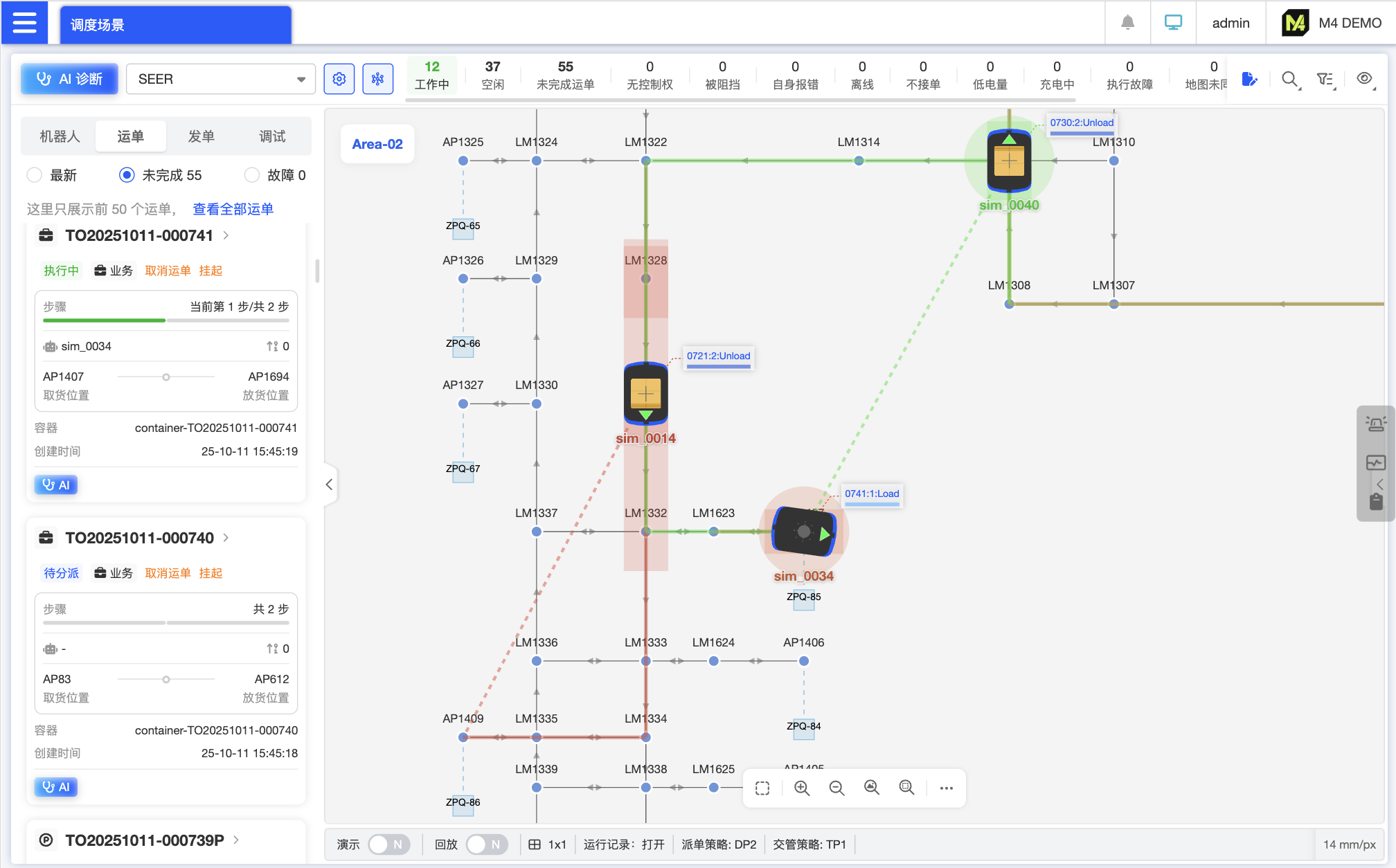
未完成的运单卡片列表:实时查看运单的执行状态、当前步骤、取放货目标位置和其他关键信息,无需点击进入详情,就能快速追踪待处理运单的核心情况,支持取消、挂起运单以及快速进入此运单的 AI 诊断。
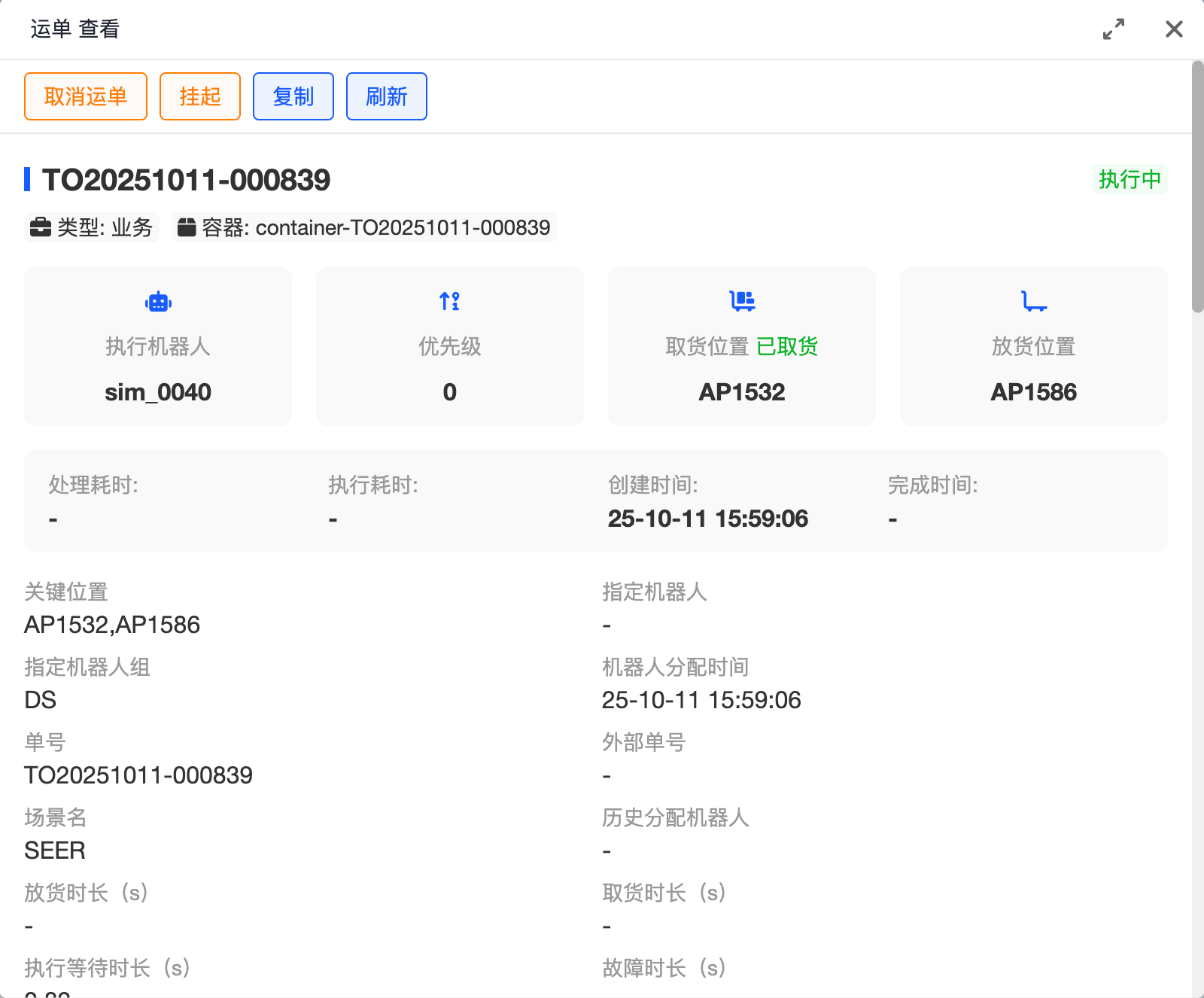
运单详情页面,完整展示运单全流程信息,包括运单号、当前状态、创建时间、运单类型、取放货位置等,帮你全面追溯运单执行过程,快速定位问题。点击顶部操作按钮可以取消、挂起、复制运单。
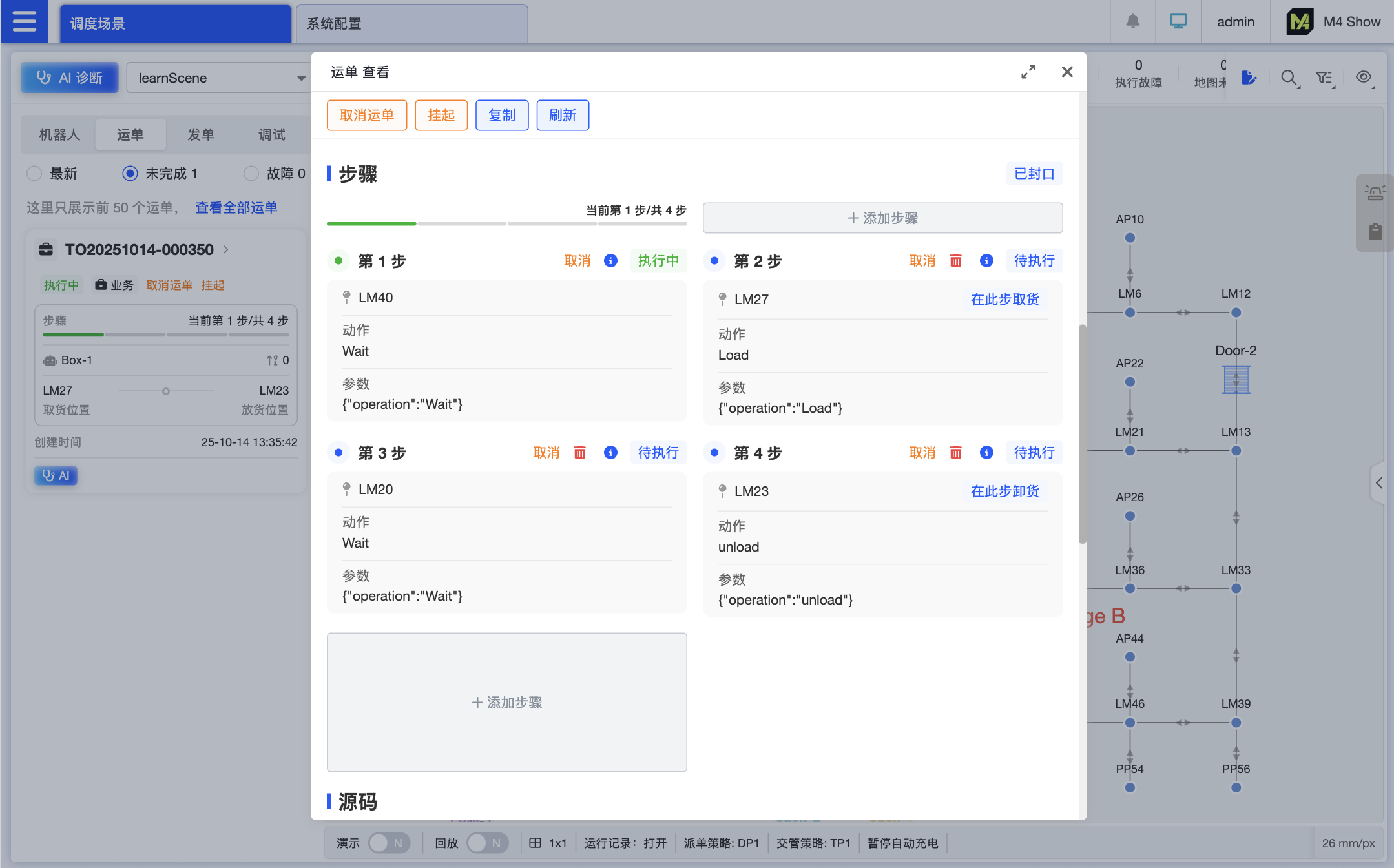
运单详情页面,详细列出步骤数量,是否已封口、当前第几步、已完成步骤。对于每个步骤,展示其点位、动作和参数,还可以取消、删除、编辑未执行的步骤。如果该步骤是关键步骤,还会显示“在此步取货”和“在此步卸货”的标识。
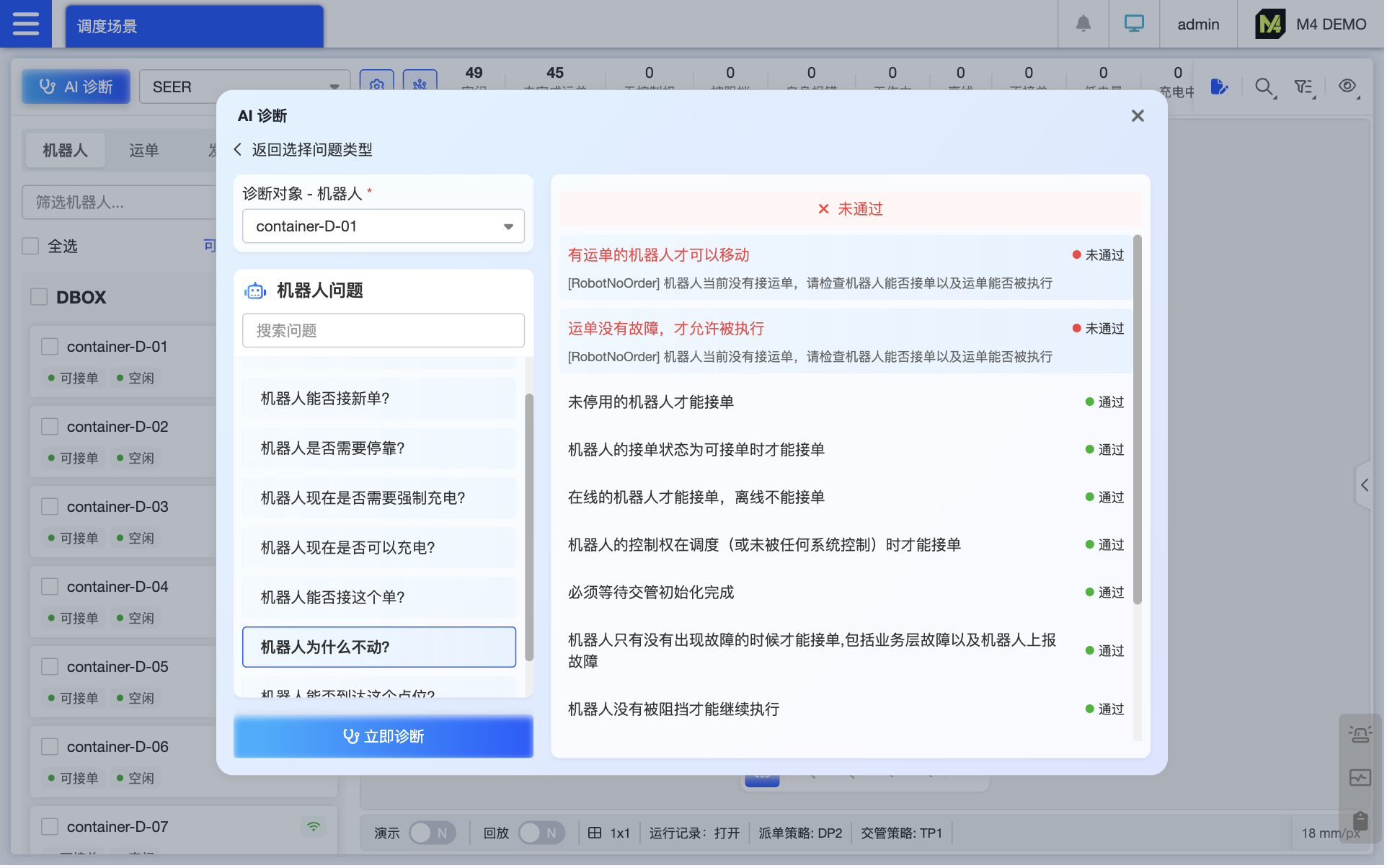
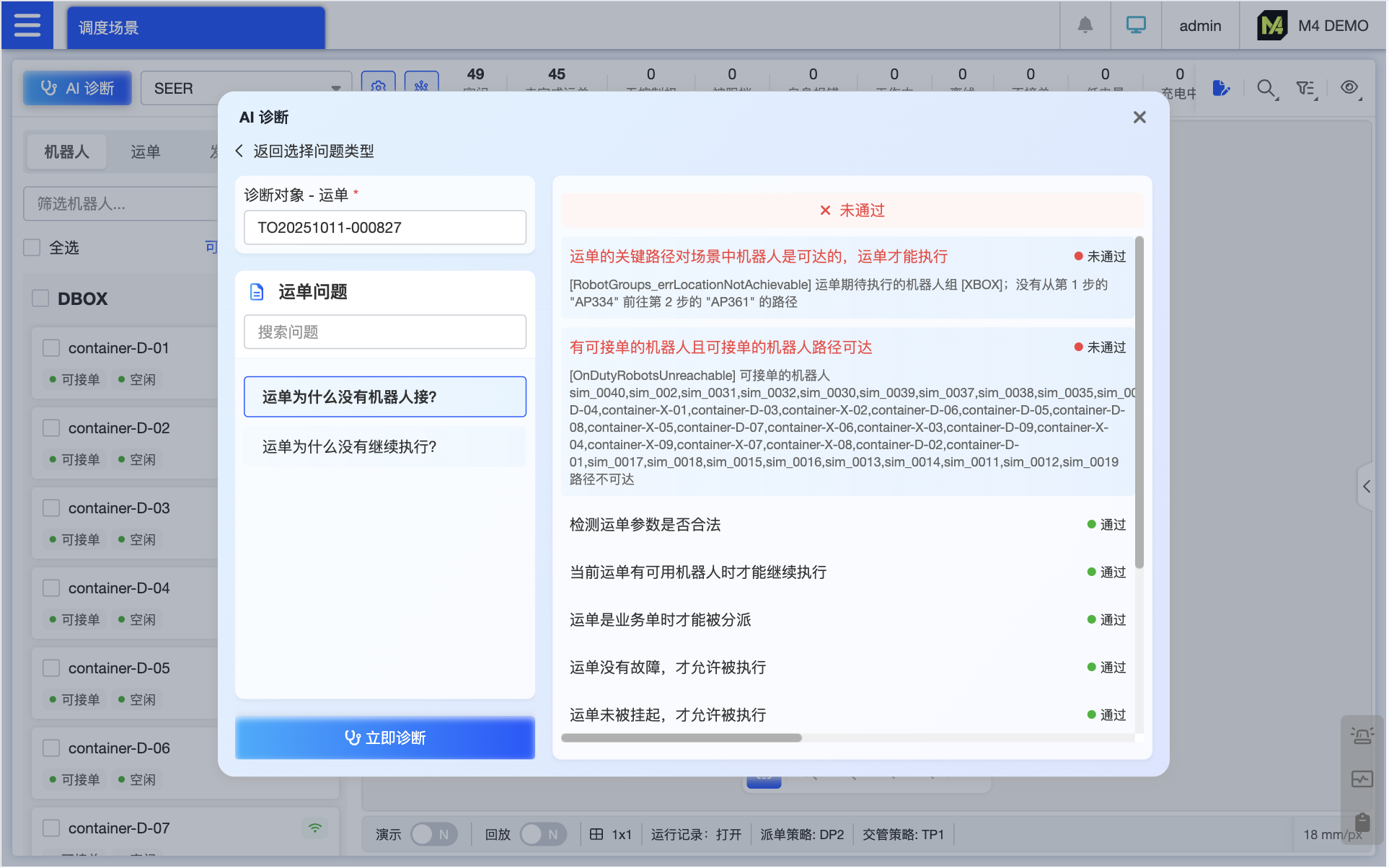
AI 诊断机器人问题,只需要选择诊断的机器人和诊断问题,系统自动检测针对该问题的关键条件,以 “通过 / 未通过” 直观展示结果,并标注不通过项的具体原因和修复指引。
发了运单,但是运单遇到了问题?输入指定运单号和问题,AI 帮你解答运单疑问。
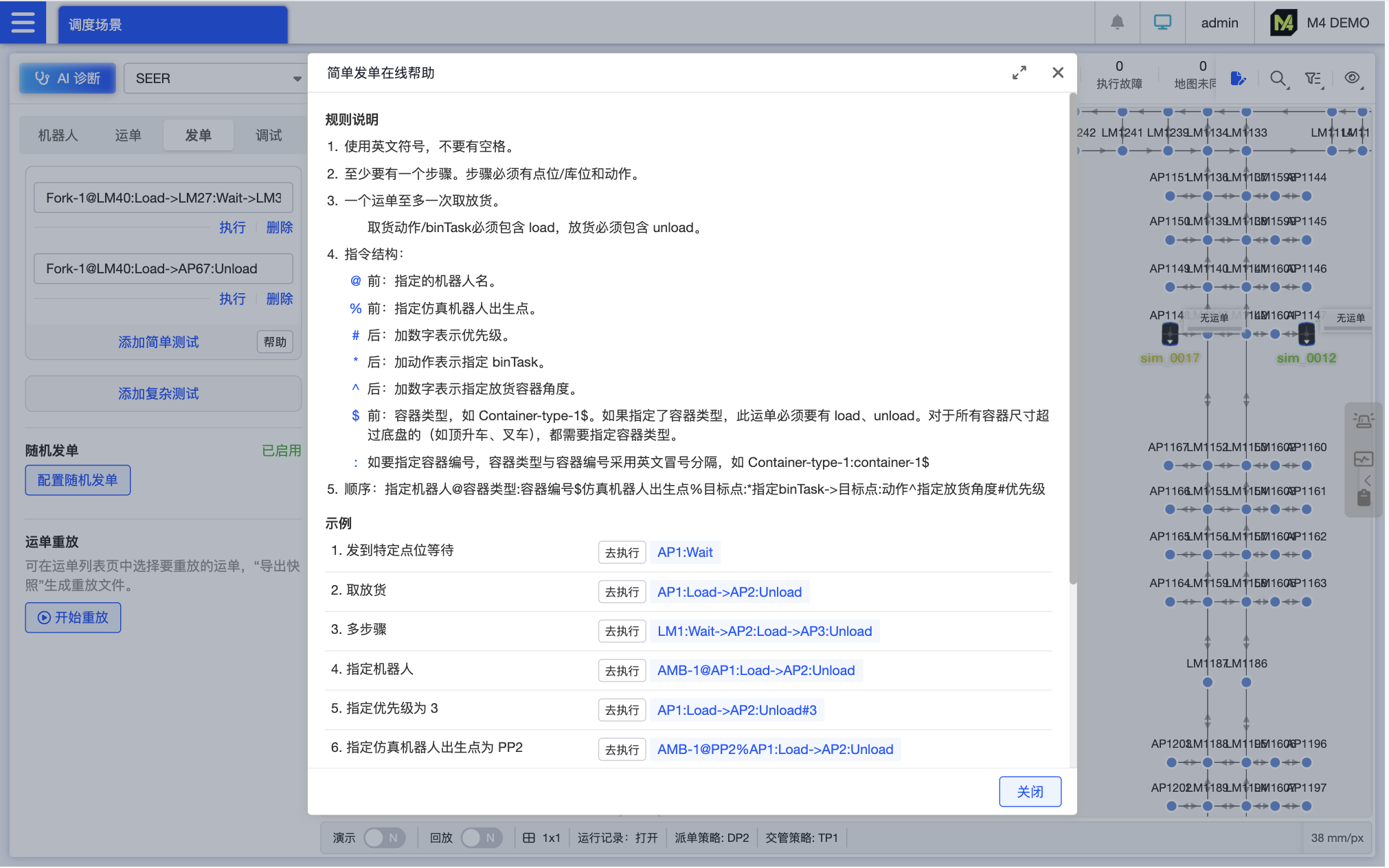
简单发单在线帮助:汇总发单全流程规则(如格式要求、必填参数、禁区限制),搭配 10+ 个场景化示例,示例可直接点击“去执行”,就可以快速将指令复制,修改后即可执行任务指令。

可以手动输入发单指令,也可以通过简单发单在线帮助找到发单指令,发单指令写好后,点击执行,即可快速实现发单。这个方式,要比其他创建运单的方式快得多。

按机器人组随机发单,可以分别为不同机器人组定制保持单量,模拟不同负荷,系统会为机器人组自动补充新任务维持单量。

按业务线随机发单,填写业务线的起点终点标签,模拟不同业务线的任务情况:输入业务线标签(如 “入库线”“出库线”),系统自动匹配对应起点终点生成任务,精准模拟真实业务场景,适合新场景上线前的压力测试。还可以一次指定多个标签,逗号分隔即可,方便快捷。
演示模式,方便在展会的场合,界面自动切换视角,查看每个机器人的运行情况。开启后,场景中定位到在动的机器人,放大,然后切换到另一个在动的机器人,以此类推。适合展会向客户直观展示系统整体运行效果。
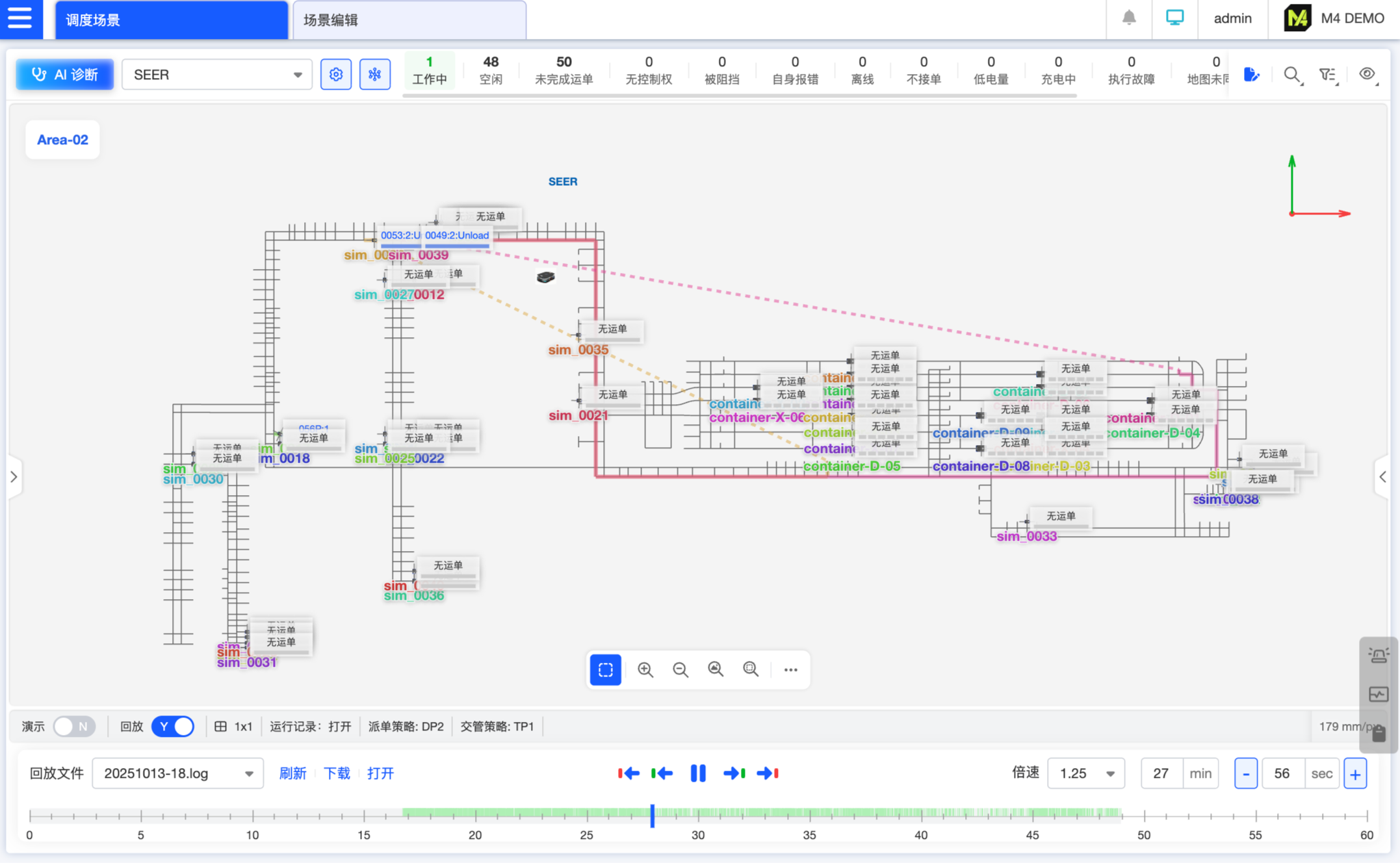
系统支持记录场景运行情况,并可以回放查看,回放分为机器人和告警上下两个时间轴,可以通过按钮快速切换机器人在动或有告警的上一帧/下一帧,支持常见的切换倍速、跳转时间等功能。回放时可拖动时间轴定位任意时刻,清晰展示当时机器人位置、运单状态及异常事件,便于追溯问题发生过程。
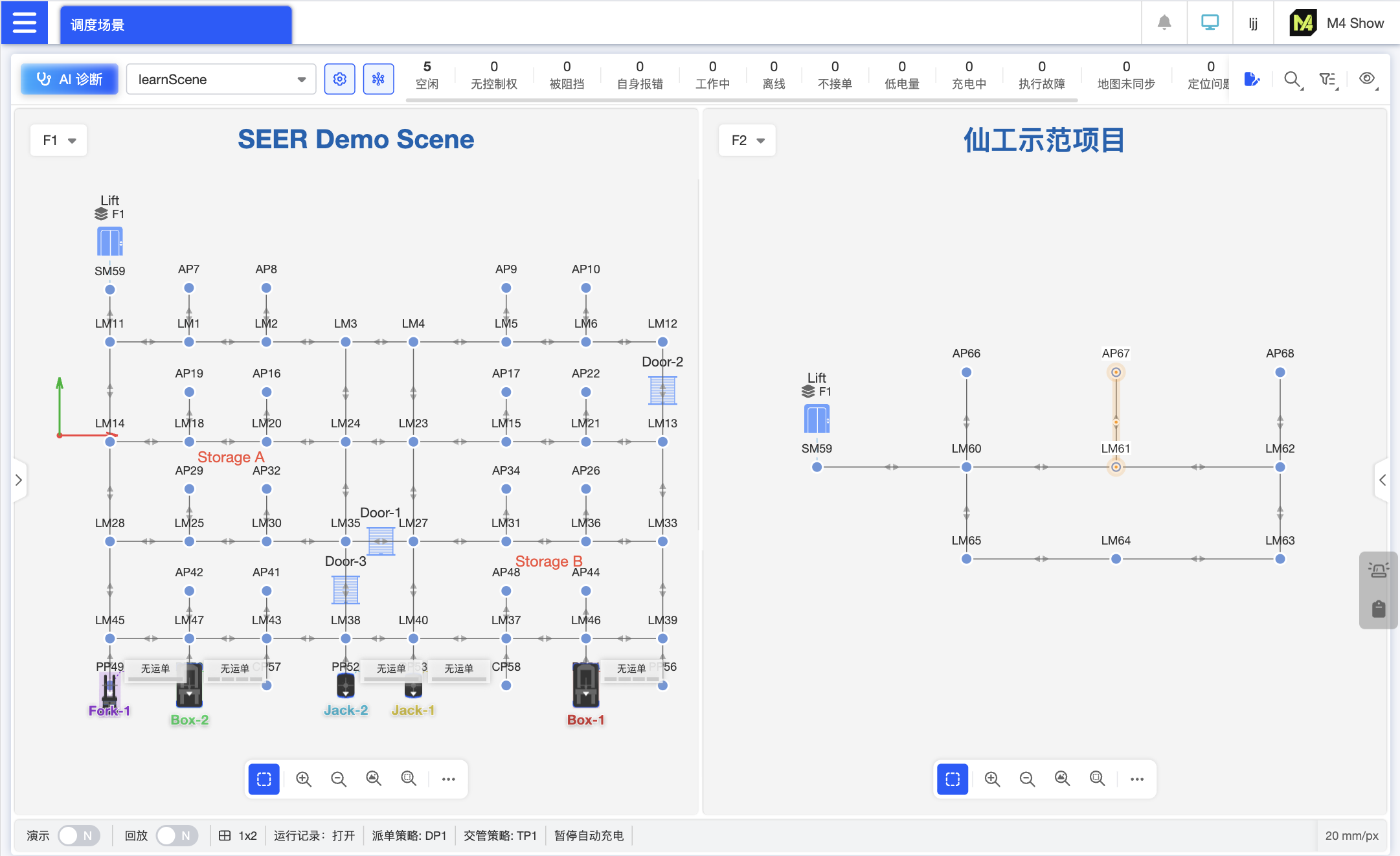
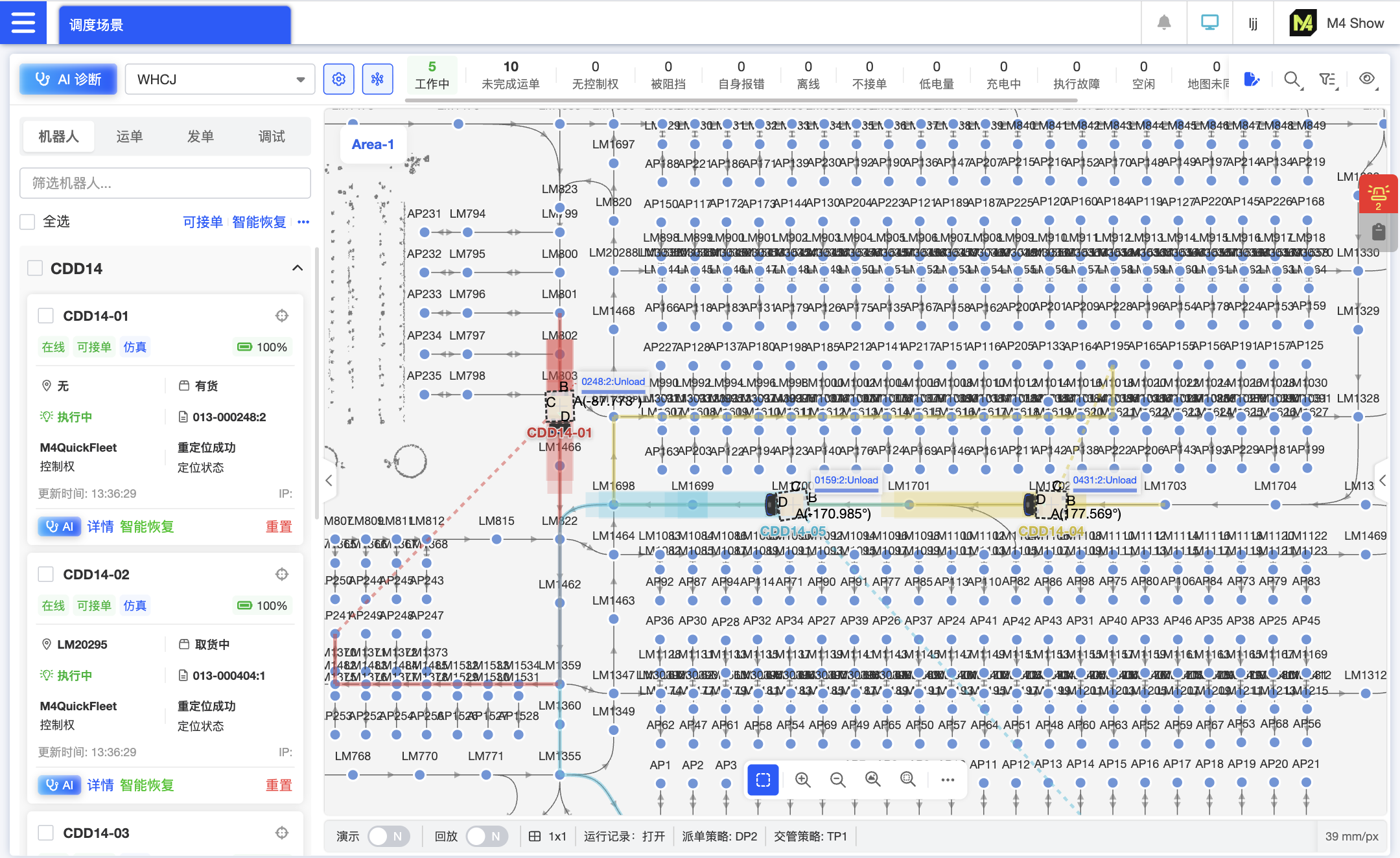
地图分屏,帮助分屏对照查看不同区域的执行情况,比如左边看一楼,右边看二楼,对比查看不同区域的机器人密度、运单进度及拥堵情况。
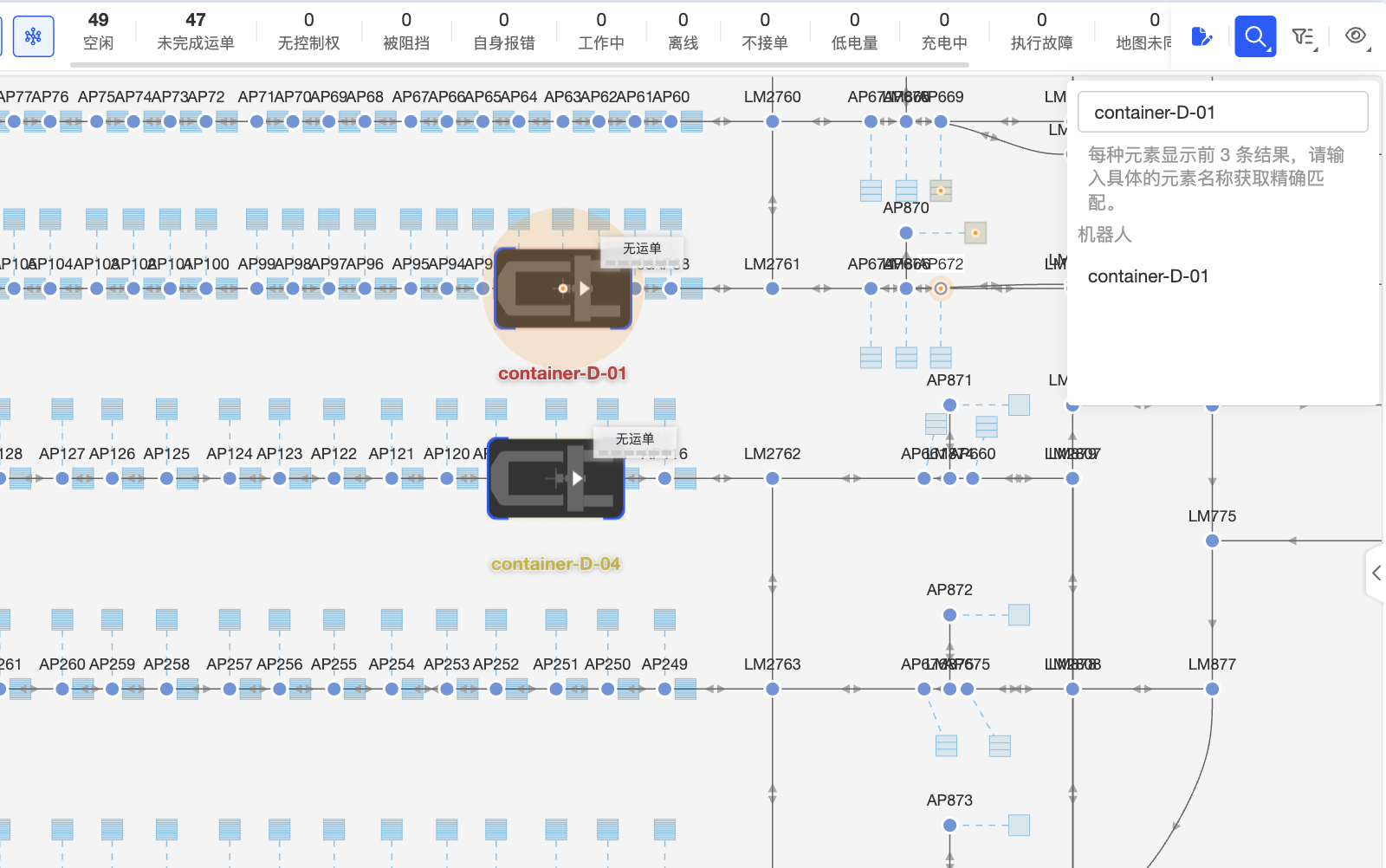
搜索地图元素,可以搜到全场景的点位、路径等,输入搜索内容后,回车,地图会将搜索结果高亮显示,便于精准定位,如果搜索不到,系统也会提示找不到搜索结果。
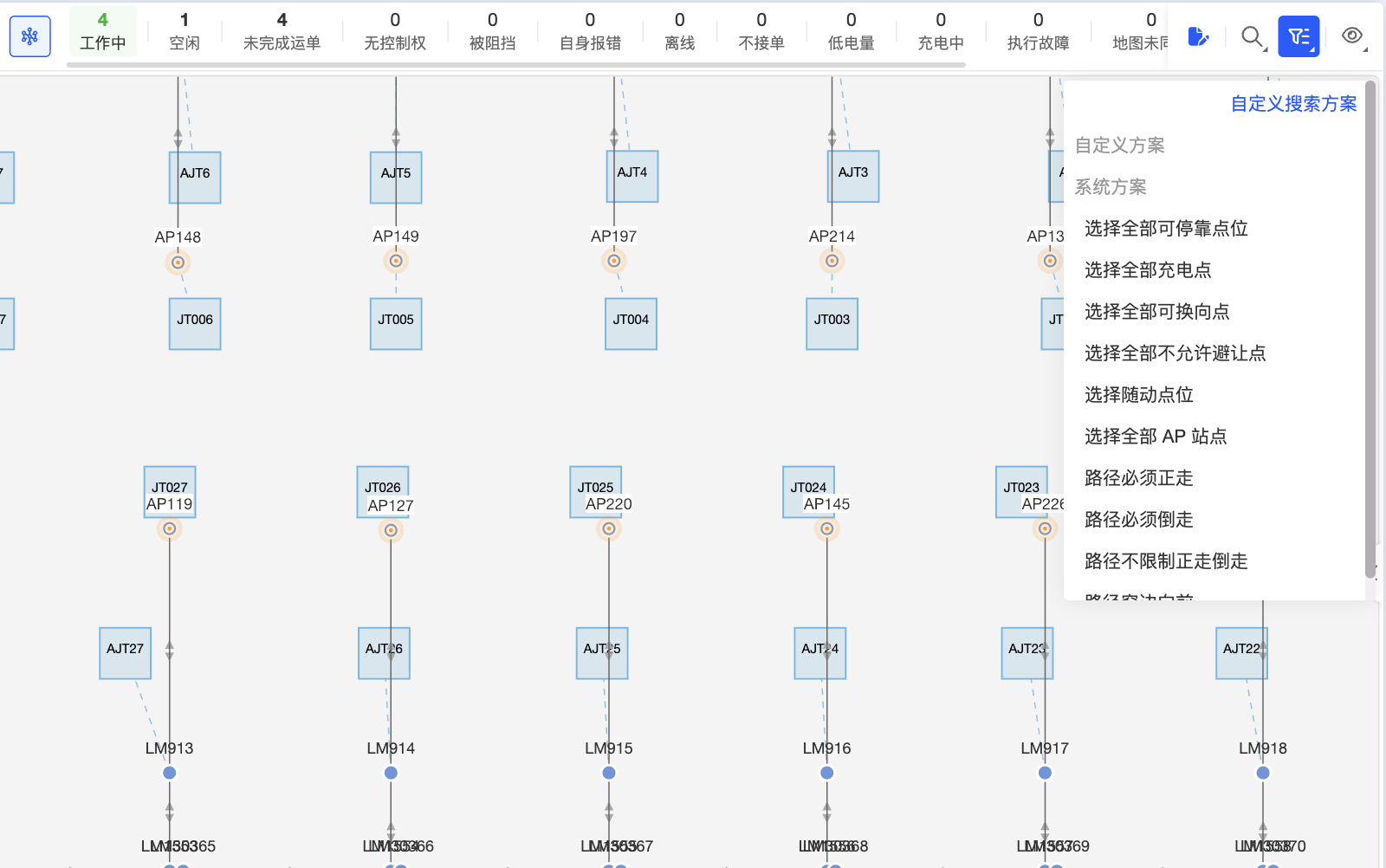
可以根据系统预置方案实现批量搜索特定属性的元素。点击系统方案中任意方案,系统自动筛选出符合条件并高亮显示,适合快速找到目标元素,再进行下一步如批量设置等操作。

支持自定义搜索方案实现批量搜索,自己设置筛选条件,保存为自定义方案,下次直接使用,满足个性化批量查询需求。

显示路径的正倒走标识,每条路径上的 DR 标识路径是否设置了正倒走,D 表示正走,R 表示倒走,直观区分机器人可行驶方向,调试时能快速发现 “路径方向设置错误” 等问题,减少排查时间。
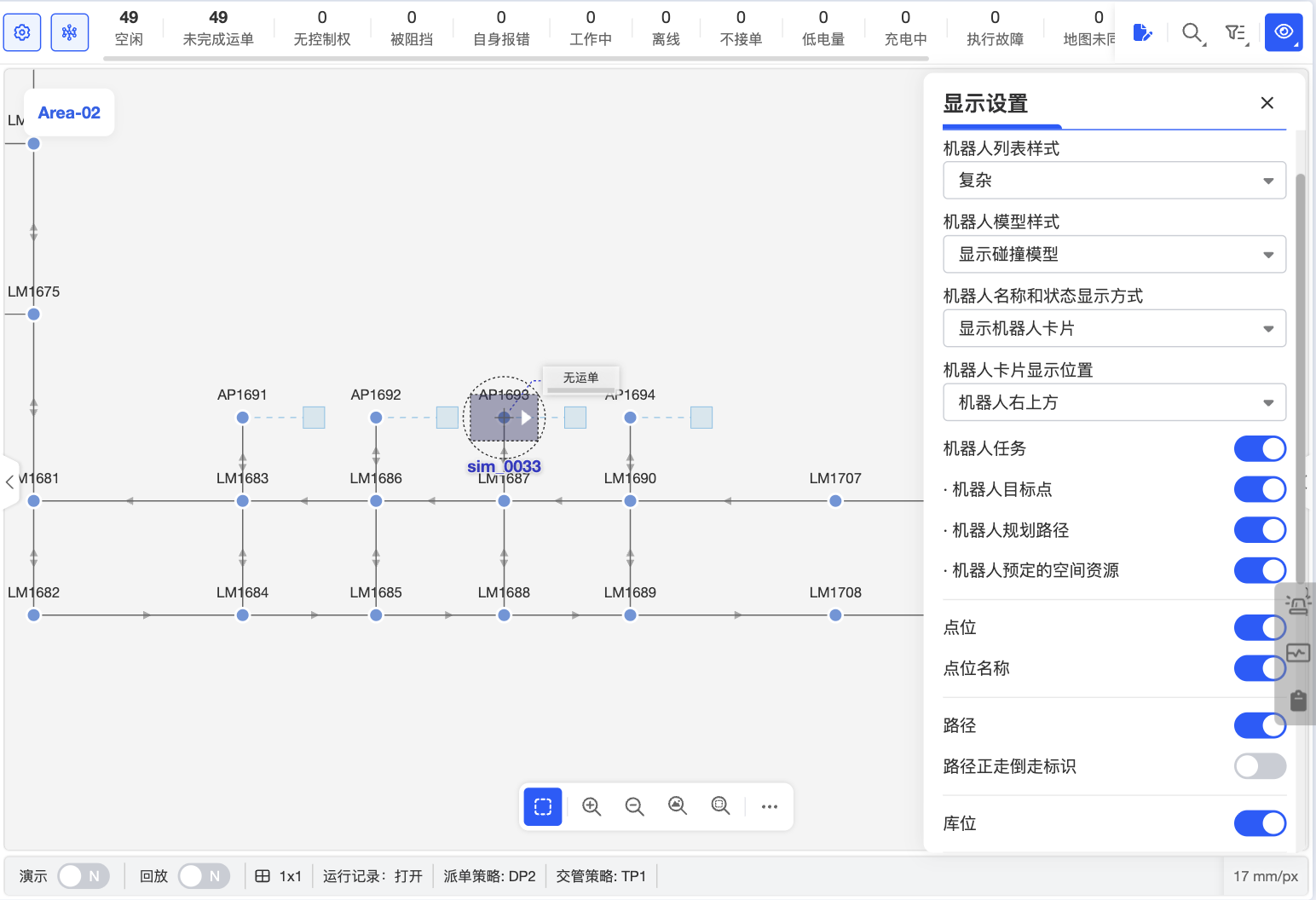
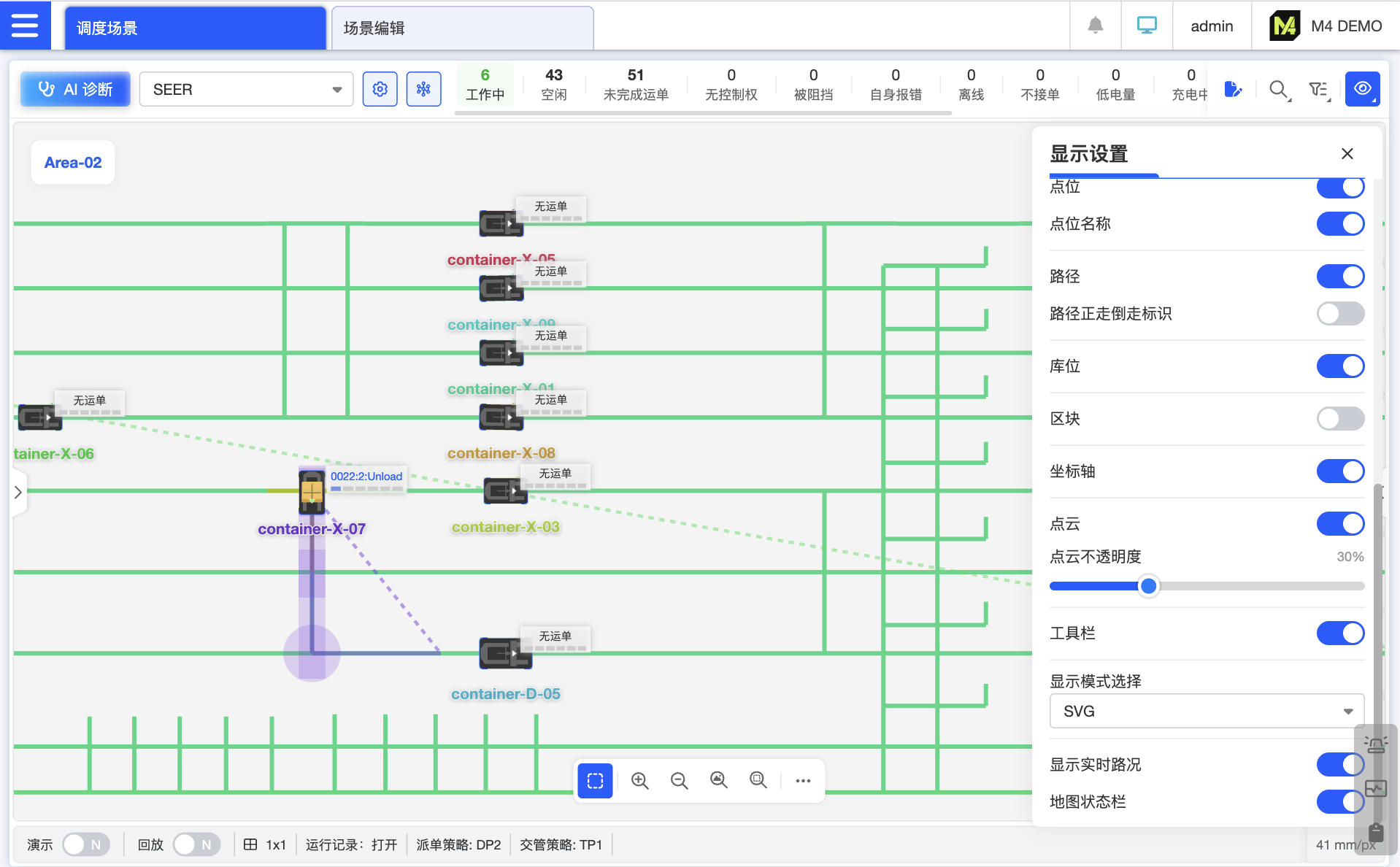
通过显示设置进行地图元素的显隐及显示样式的设置,可以根据自己关注的侧重点自定义设置,比如有人想看简单的机器人卡片、有人喜欢复杂的机器人卡片,还能调整点云不透明度等等内容,让地图只展示你关心的信息,界面更清爽。
左侧的机器人卡片可以变为简单卡片,只需要在显示设置中选项选择简单即可。当机器人数量很大的时候页面更简洁,机器人数量显示更多。
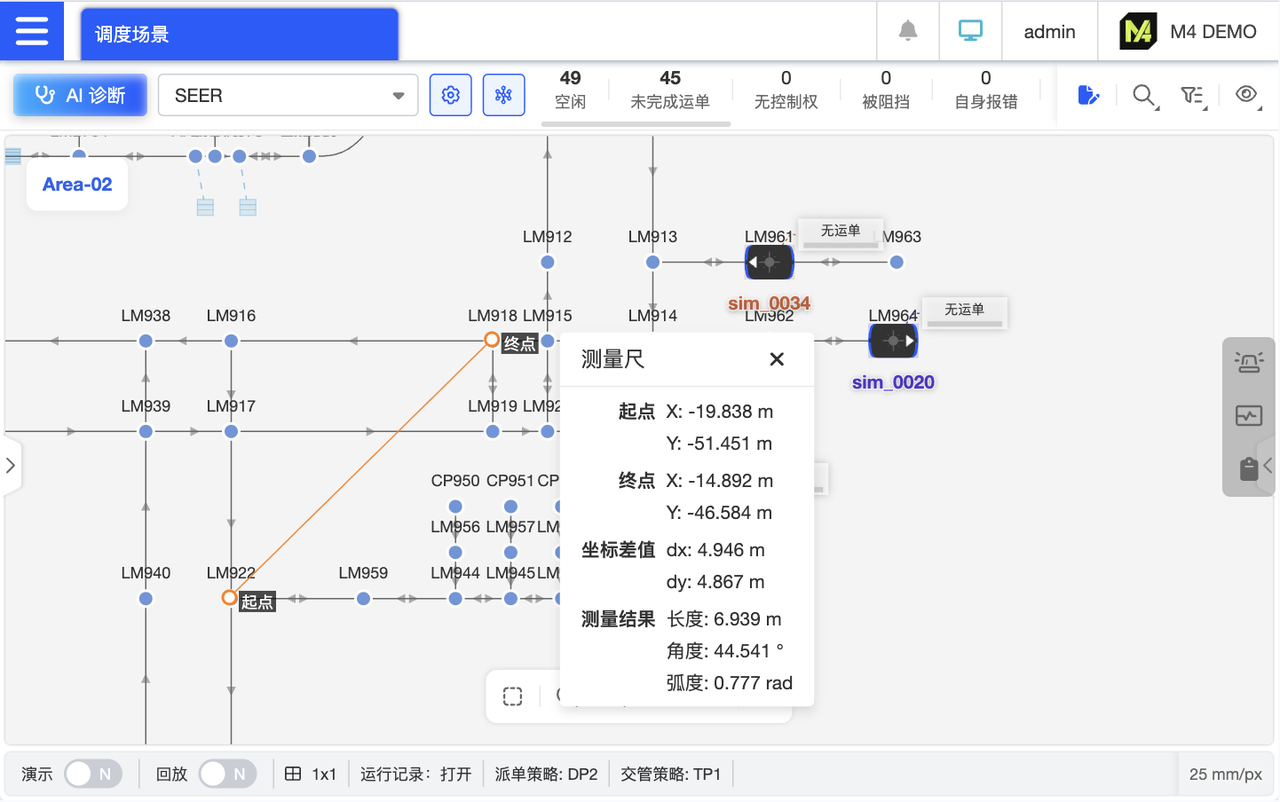
地图测量,给出起终点坐标和坐标差值与长度、角度信息,还可以将测量结果直接复制,便于记录重要测量信息。

机器人详情面板,实时展示机器人状态,可以进行快捷操作,如不接单、智能恢复、重置等,分类展示机器人库位、告警、位置等基本信息,还能点击分类图标快速跳转到对应位置,方便快速查看机器人信息。
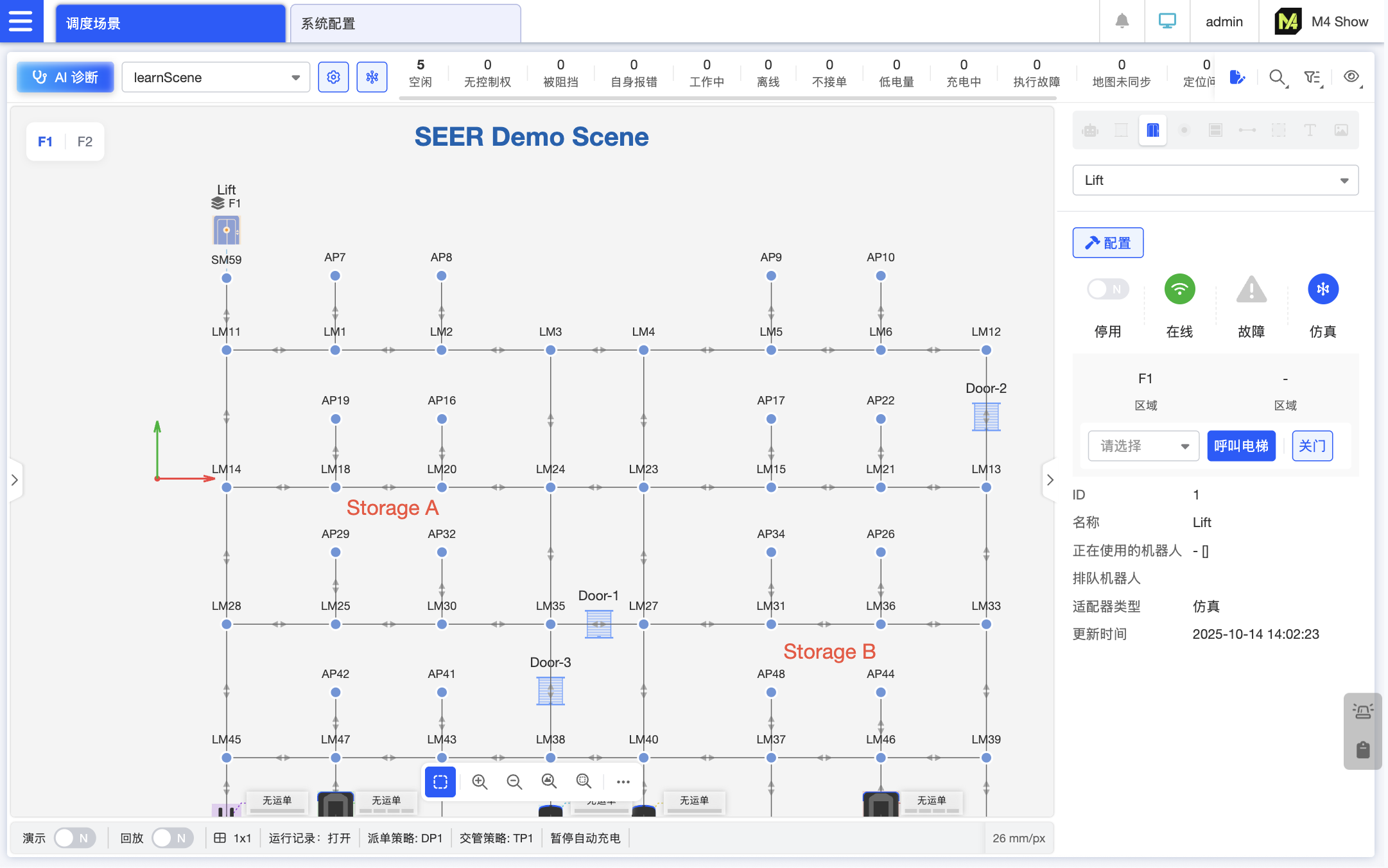
电梯详情面板,展示电梯在线、故障等状态与基本信息,还能实现呼叫电梯到指定楼层和让其关门等按钮远程控制,无需现场操作,提升调度效率。

门详情面板,展示门状态与信息,还能进行快捷的开门、关门操作。
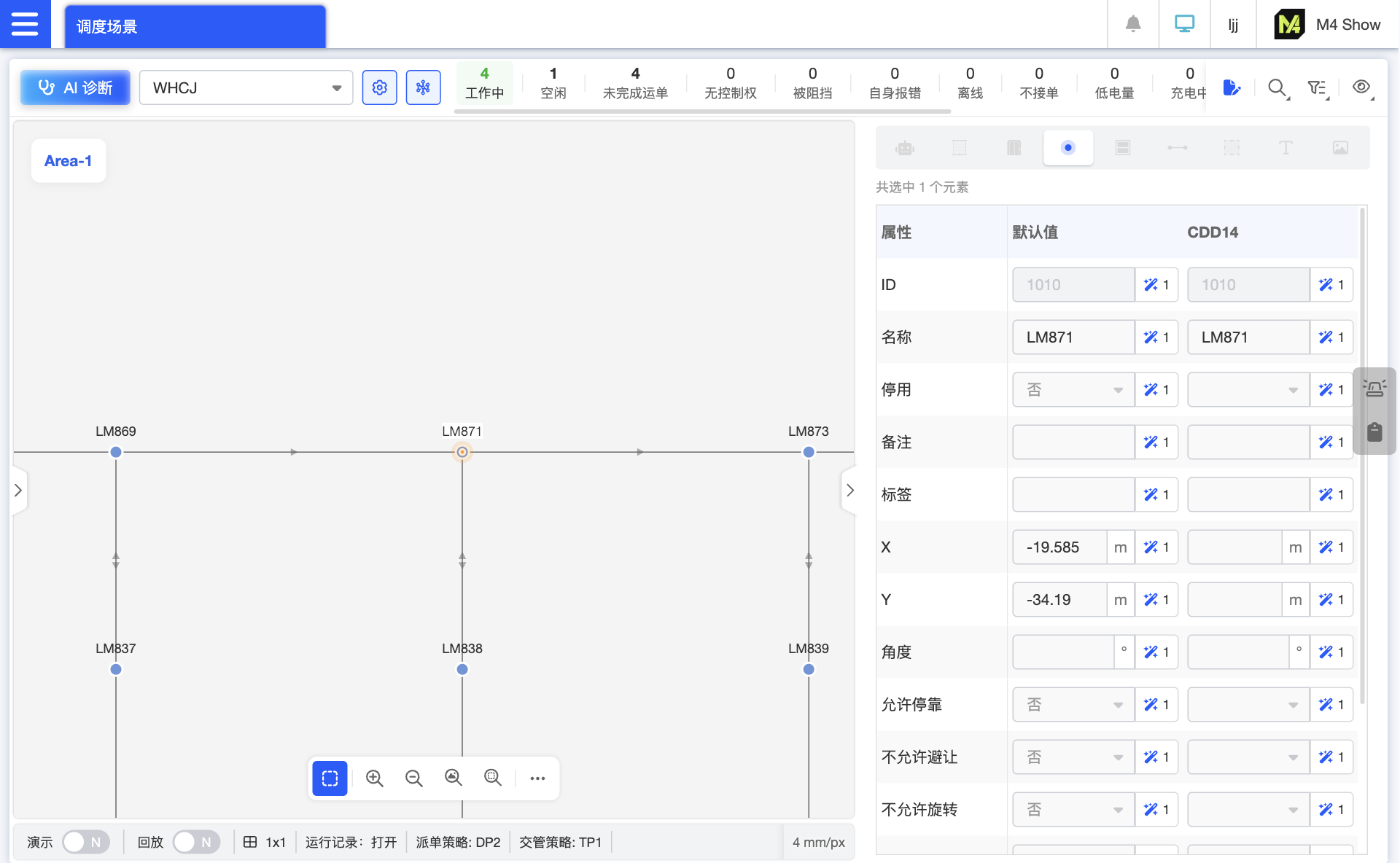
查看单个点位的属性,属性名称和属性值以表格形式展现,将默认值与机器人组的值分列展示,左侧显示默认值,右侧分列显示各机器人组的定制值,直观看到不同机器人组的值是否与默认值有差异。且针对不同属性,以后缀形式给出单位。
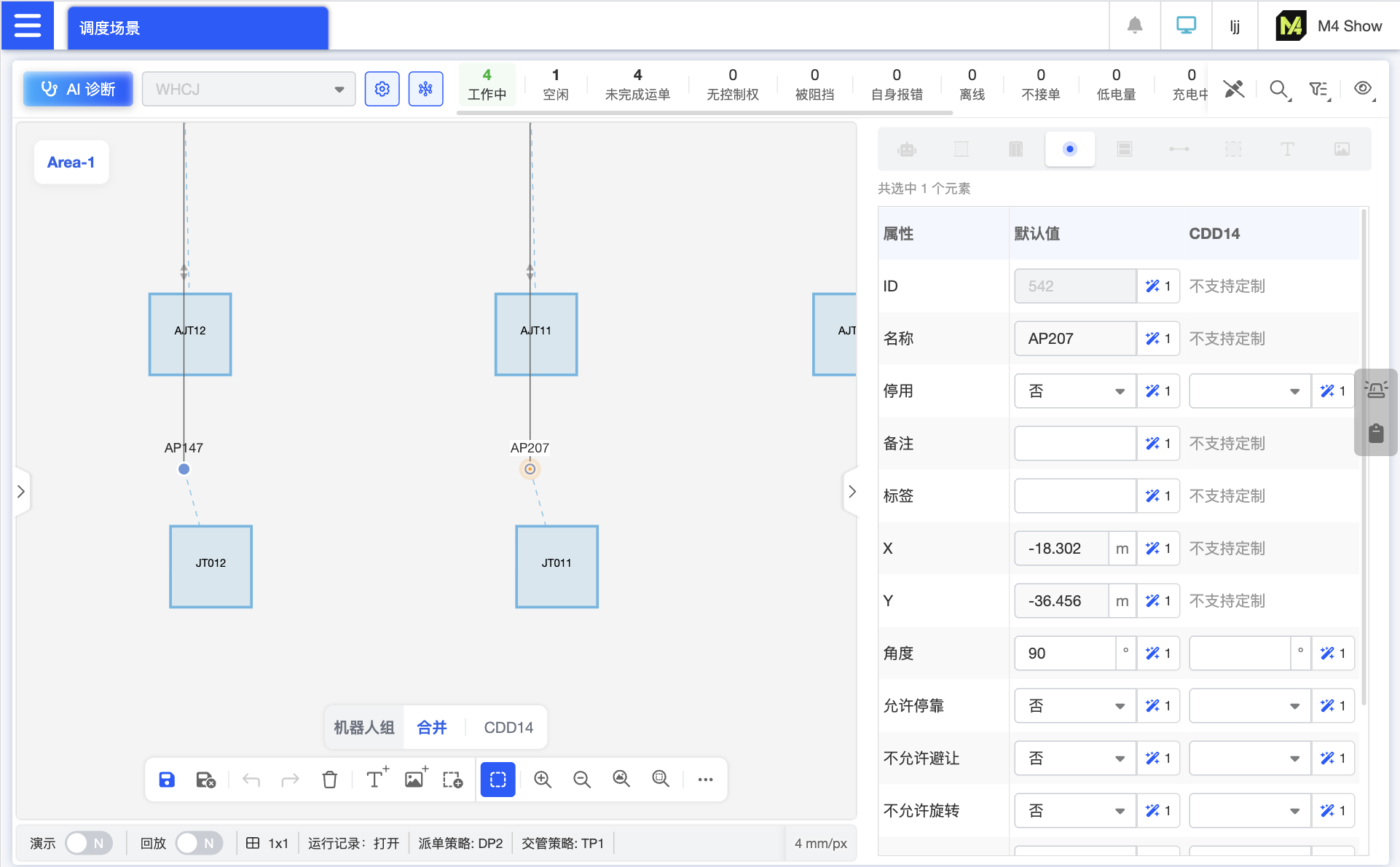
地图编辑模式下,编辑单个点位,可以对不同机器人组的值做定制,不支持定制的属性有清晰的标识,满足不同机器人的差异化需求。
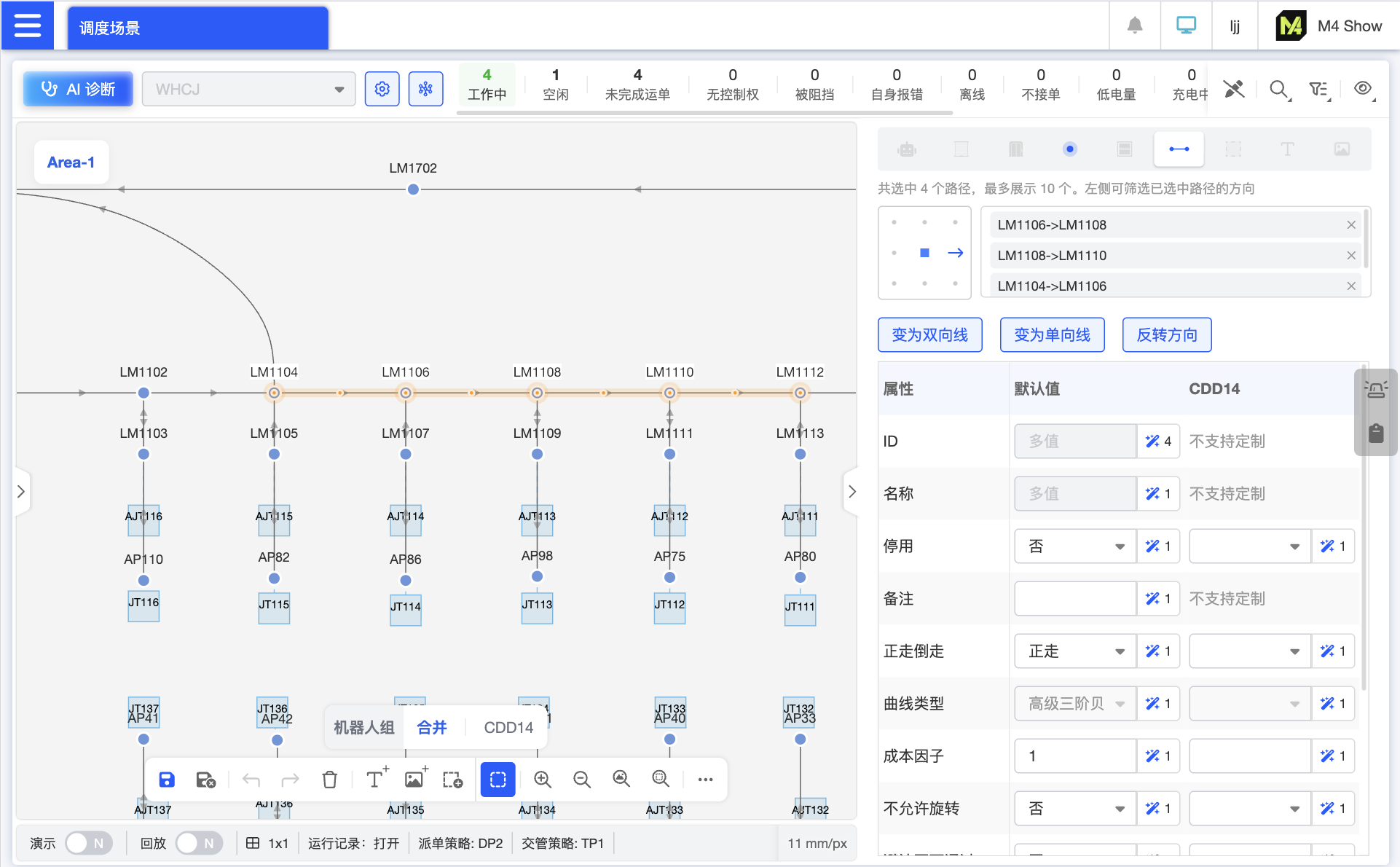
地图编辑模式下,编辑多条路径,界面顶部米字型选择器展示选中路径的方向,可以通过点选进一步筛选路径的方向。除此以外,通过按钮,可快速将单向线变为双向线、或将双向线变为单向线,或反转方向。在表格中,可以针对路径,对不同机器人组做定制,满足不同机器人的差异化需求。不支持定制的属性会给出标识。

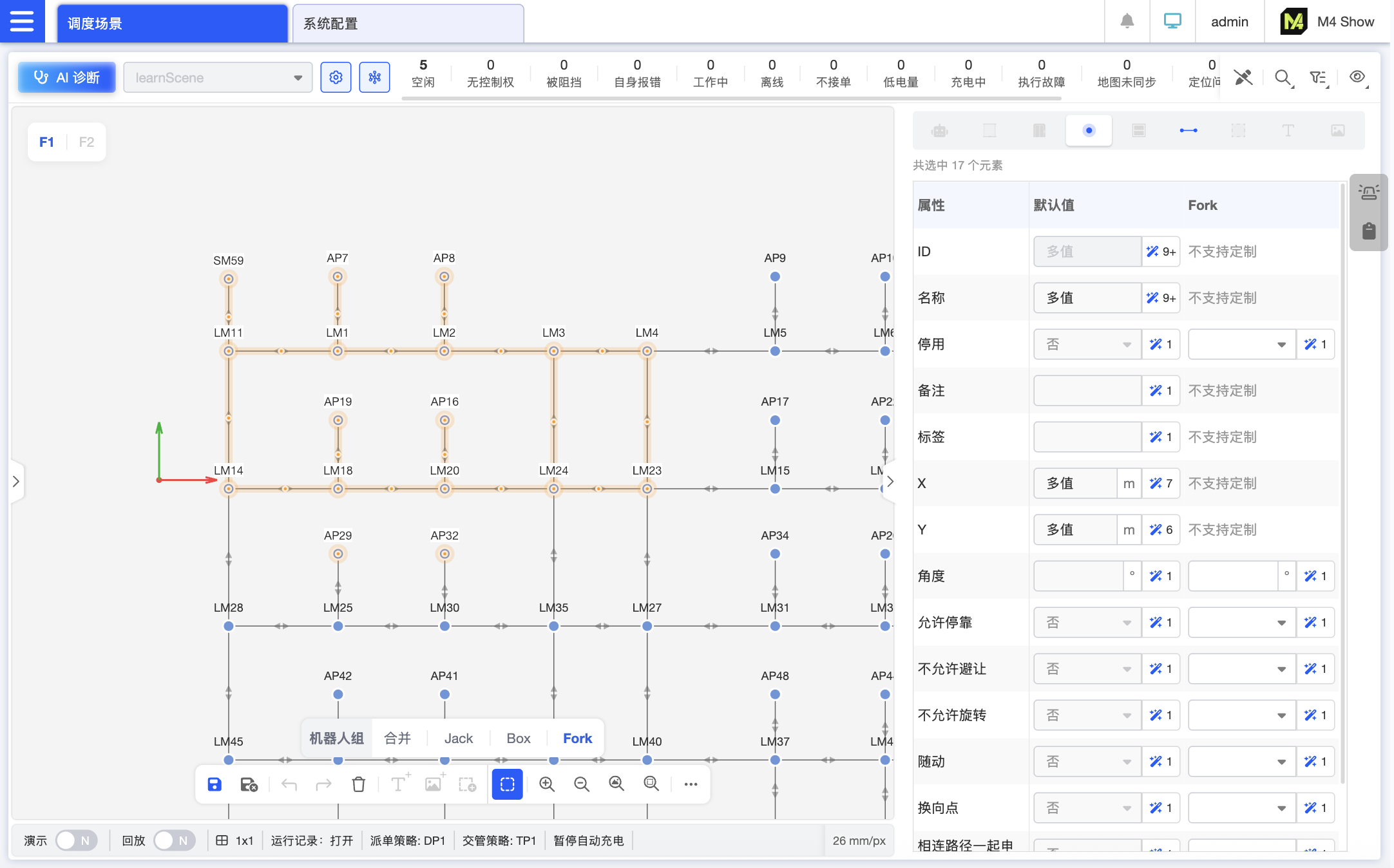
地图编辑模式下,框选多个点位,打开元素详情面板,可以看到如果多个点位的属性值不同,则会显示为“多值”,如果属性值都相同,则直接显示为属性值,如这 7 个点位都是未停用,所以停用属性值为“否”,在每个属性值后,有一个数字,表示这些元素的该属性值共有多少个不同的。在可编辑的输入框中,修改属性值,就可以批量设置这些点位的属性。
地图编辑模式下,可以直接对分组地图修改点位属性,切换到 “Fork 组地图” 视图,编辑的点位属性只会应用于叉车组,不影响其他机器人组,分组管理更清晰。

插入文字,将其调整到合适的大小颜色等,用作地图装饰,比如可以给地图取一个名字放在地图最上方,让地图更易读,或者更适用于展示。

插入图片,将其调整到合适的大小等,用作地图装饰。可上传场景实拍图或示意图(如 “货架样式图”“门控面板图”),缩放调整后贴在对应位置,帮助现场人员对照实物理解地图标识。
在显示设置中打开显示实时路况,地图上用颜色区分路径拥堵程度(绿色畅通 / 红色拥堵),直观判断当前调度场景的整体路况。
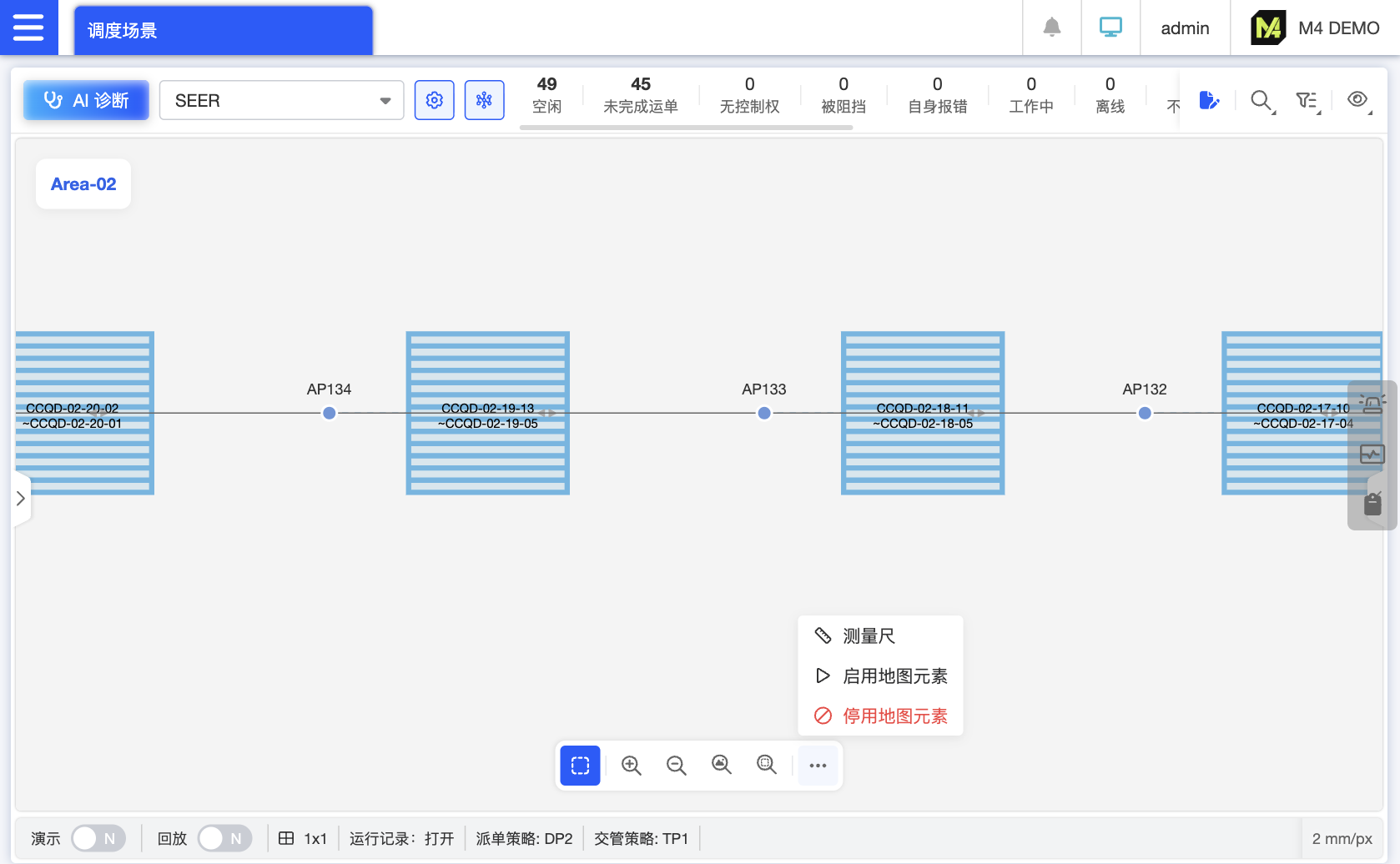
不需要进入编辑模式,支持快速启用/停用地图元素:选择对应元素,在地图底部工具栏的更多里,点击启用或停用地图元素,即可快速操作。
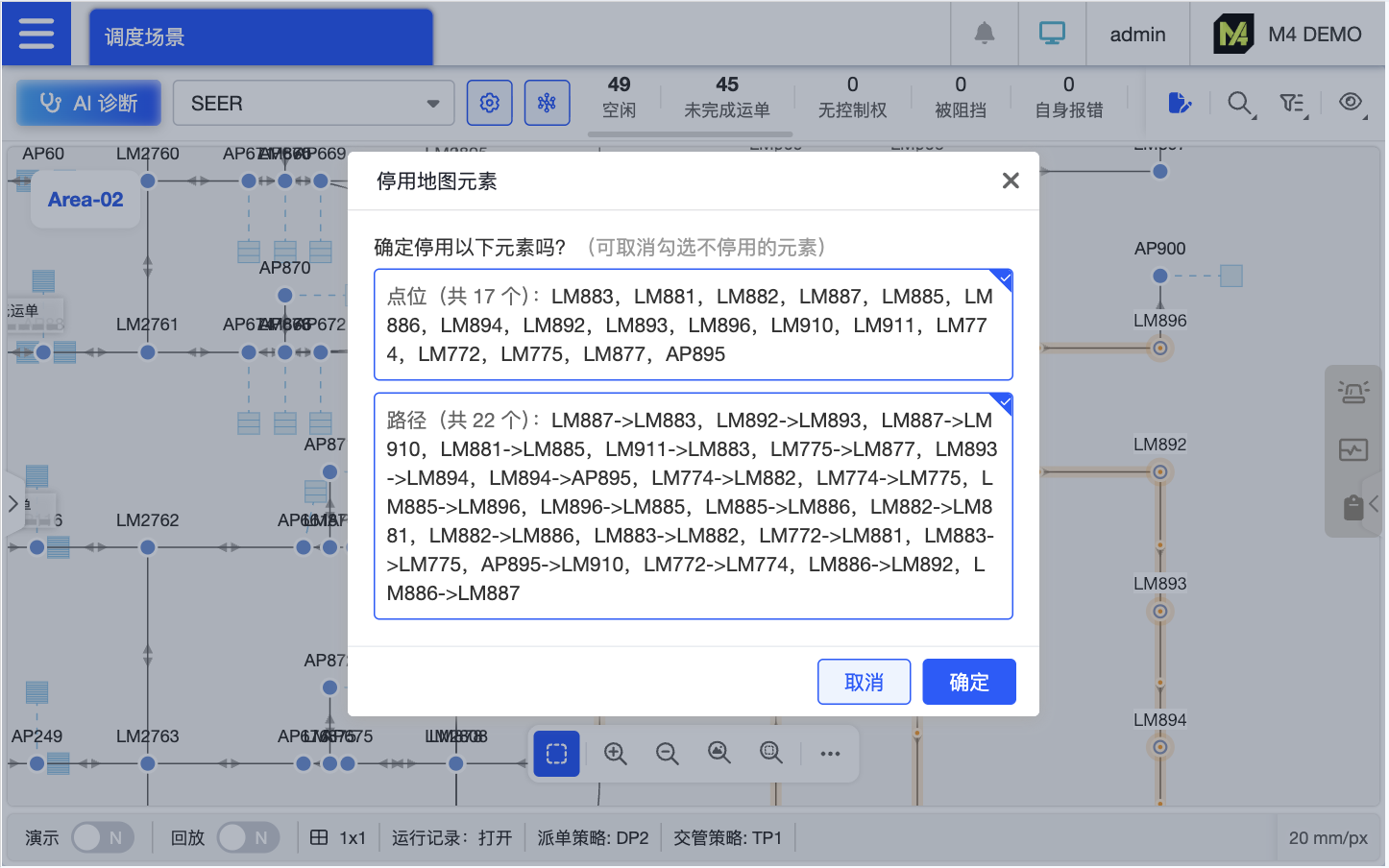
当框选了多种元素,可以在对话框中进一步选择停用元素的类别,比如不想停用点位,只想停用路径,把点位取消勾选即可。

支持批量删除地图元素。框选多个无用元素(如废弃点位),点击 “删除” 并确认,即可一次性清理,避免逐个删除的繁琐操作。如果框选了多种元素,可以在对话框中进一步选择删除的种类,实现精准的控制。
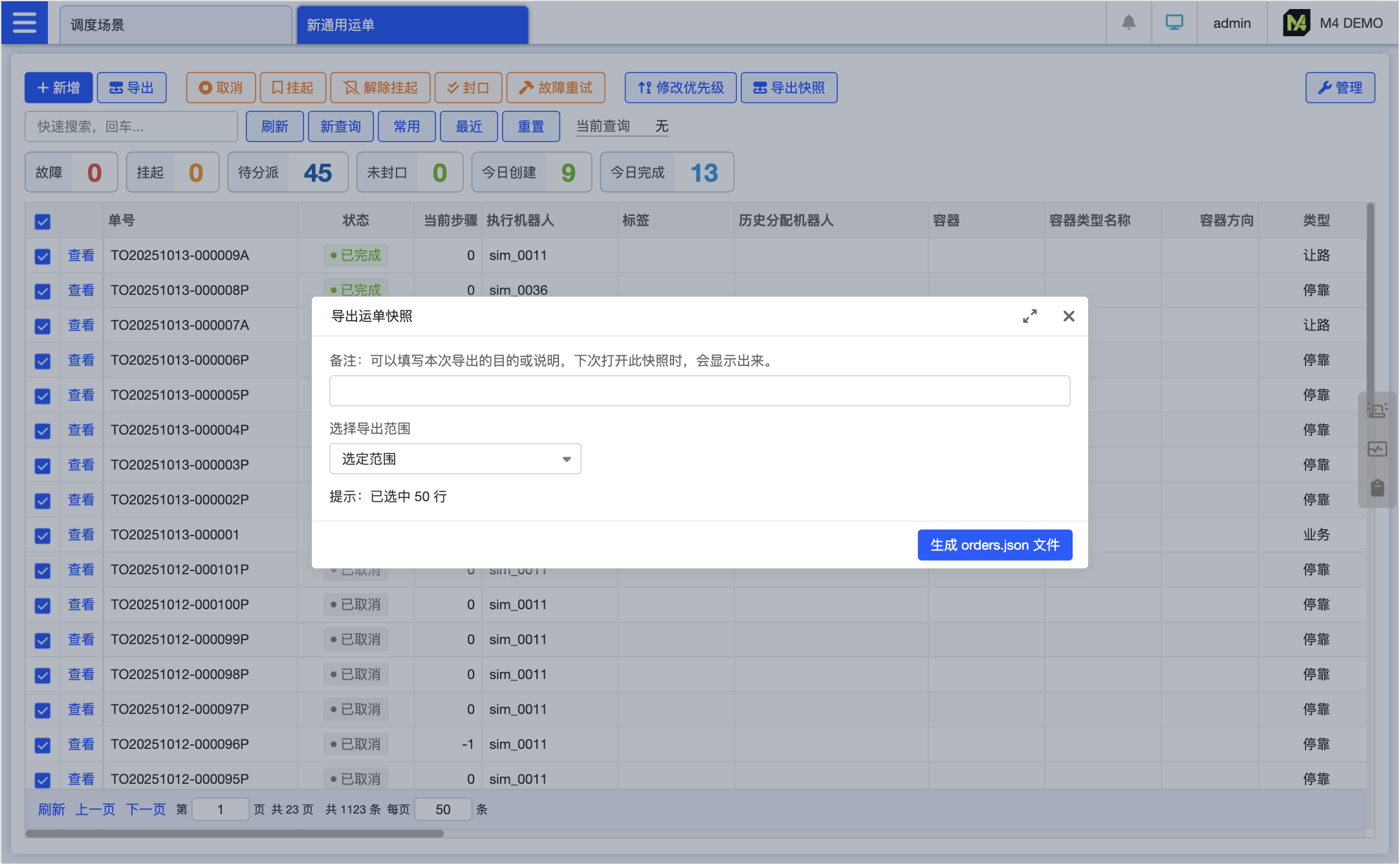
在运单列表页,选择目标运单,点击导出快照,导出时填写备注,方便导入时查看备注,点击生成文件,可以将运单文件导出为快照。导出的文件为 order.json 后缀的文件。
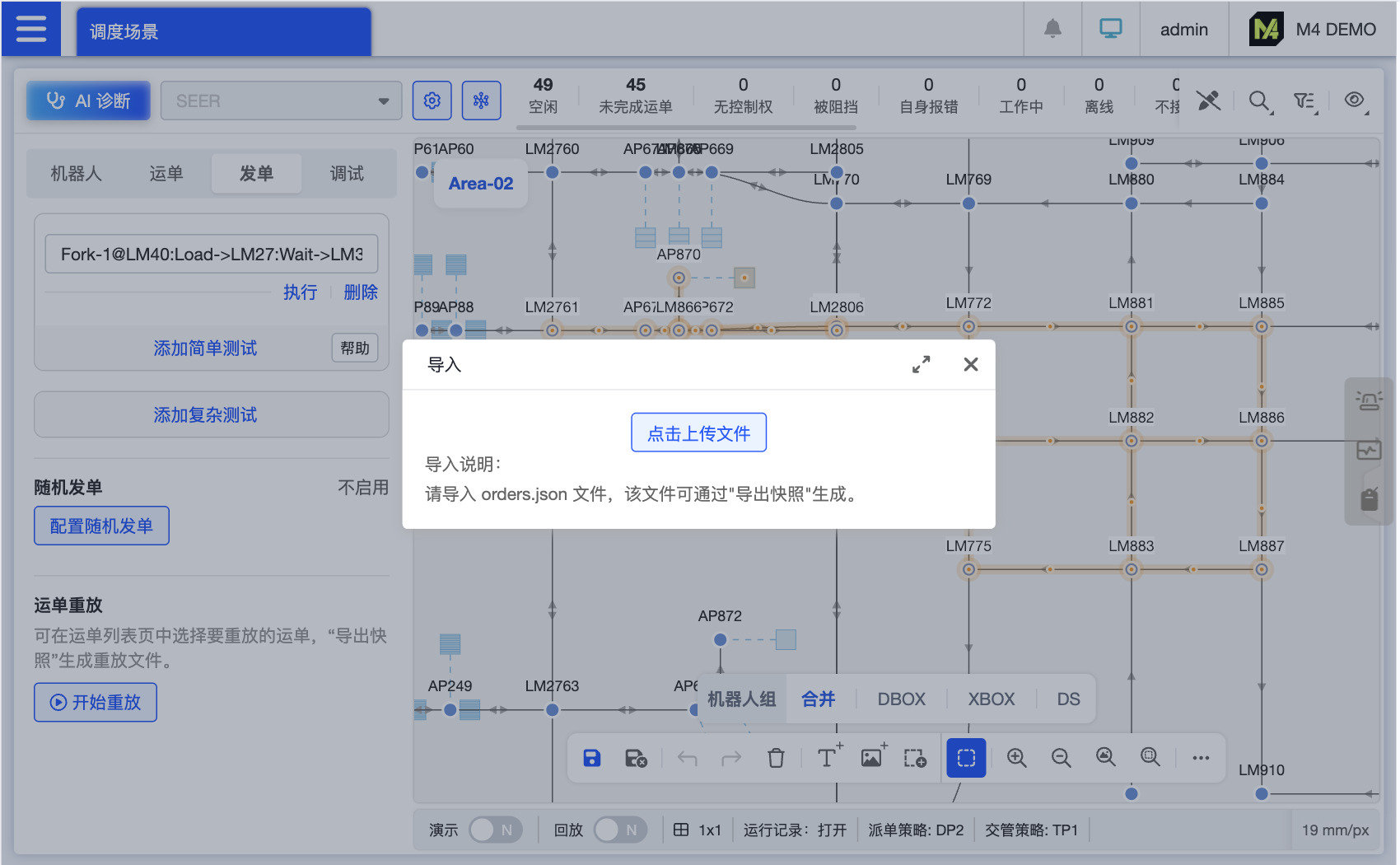
导出运单快照后,在发单页面的底部运单重放区域,点击开始重放,将导出的运单快照文件上传。
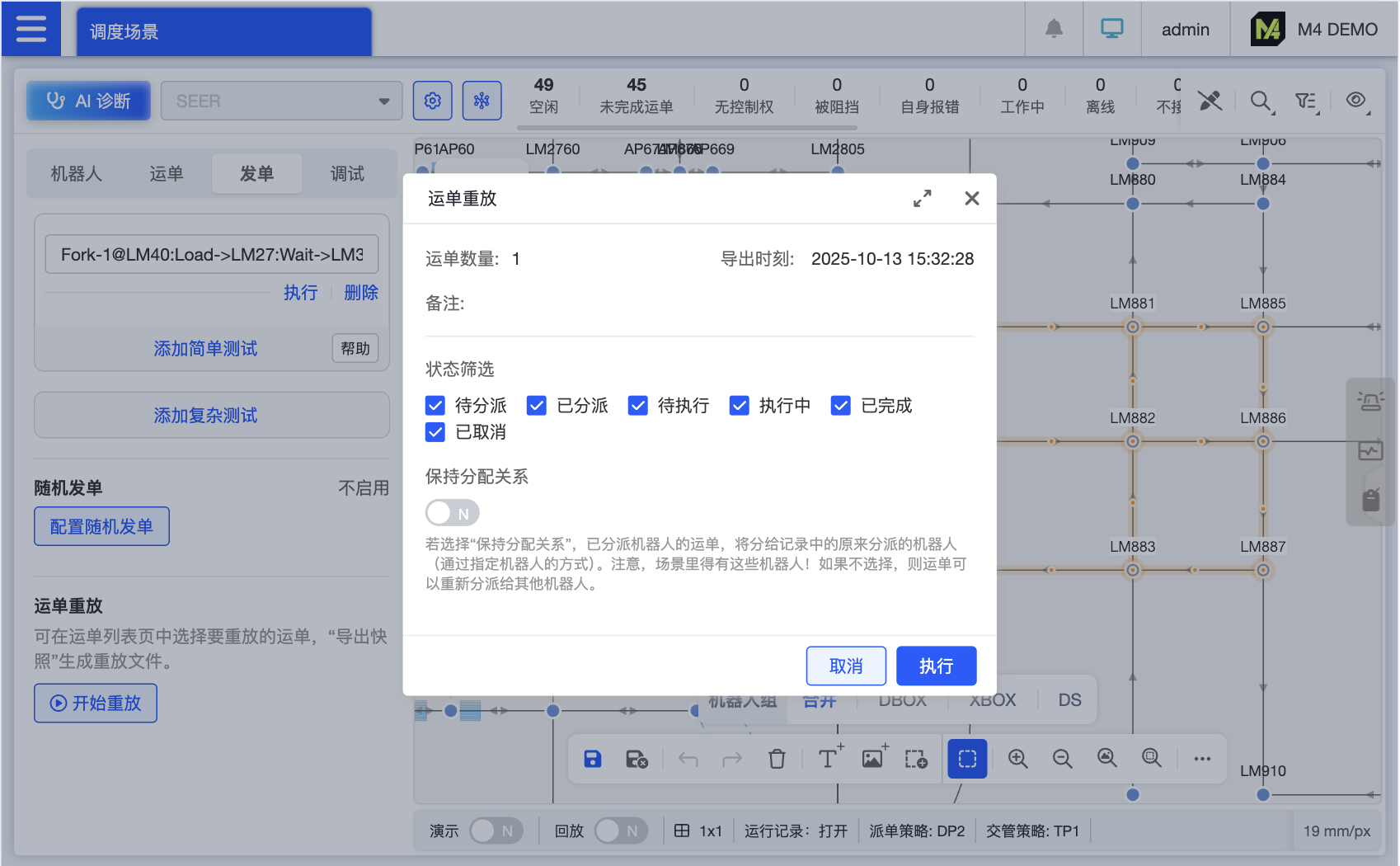
系统对运单快照文件进行解析,检测运单数量、导出时刻和备注,呈现在页面上,用户可以对运单状态进行筛选,还可以开启“保持分配关系”,开启后表示已分派机器人的运单,在重放时若有这些机器人,则会继续让他们执行对应运单。点击执行后,将生成新的运单,实现运单逻辑的复用,便于调试、验证运单执行效果。
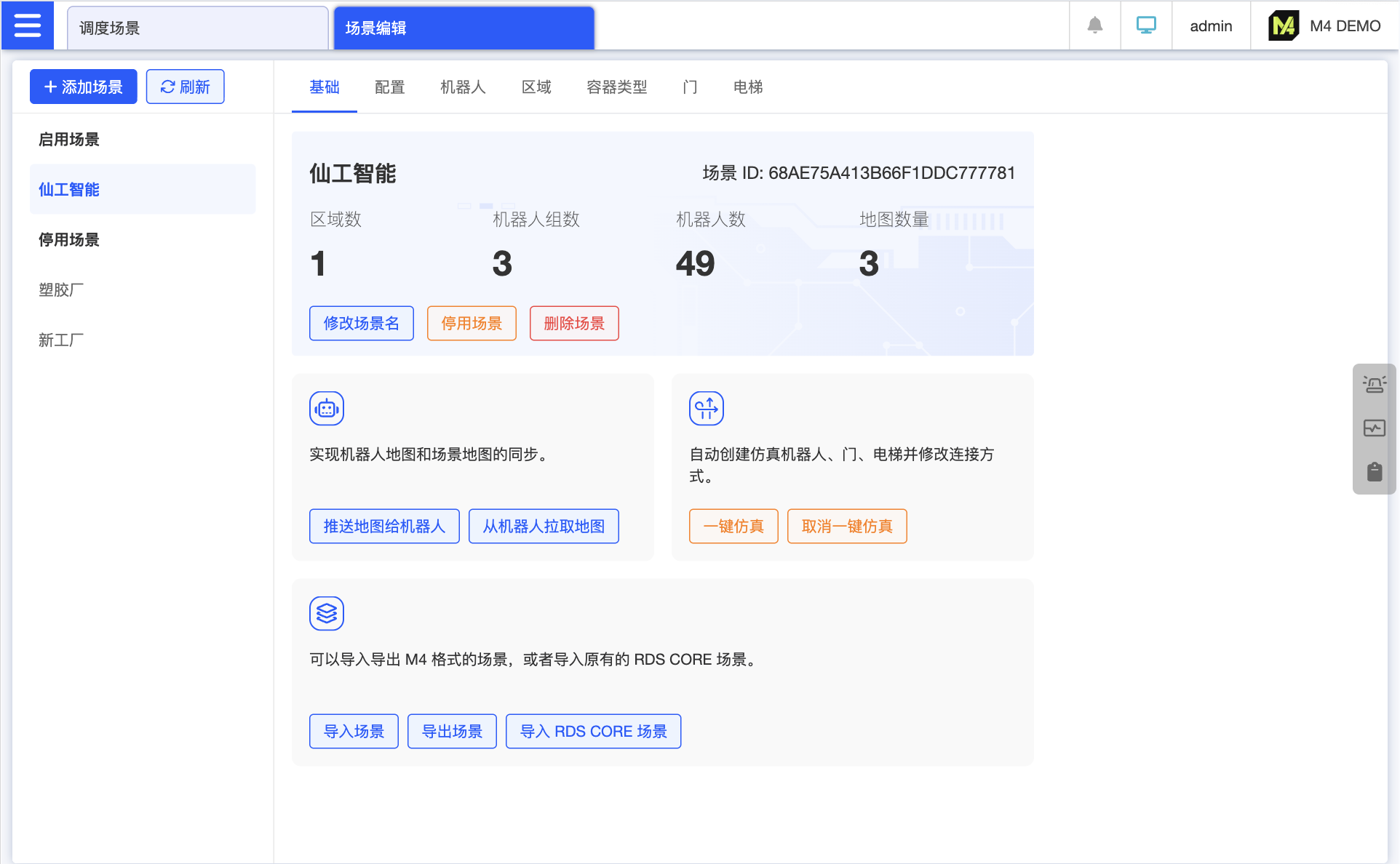
场景基本信息概览,左侧是全部的场景列表,包括启用的和停用的。中间部分可以看到场景名、场景 ID 和区域、机器人组、机器人、地图数量。还可以进行场景的相关操作,比如修改其名称、停用、删除、导入、导出场景。地图的推送和拉取也在这里进行,导入场景后在这里一键仿真和取消一键仿真。

分类展示场景的所有配置项,点击左侧菜单可以快速定位到对应类别。我们追求配置项少而准确,且每个配置项都有注释辅助理解。

配置页的设置就是默认策略,如果希望针对不同时间和机器人组进行定制,可以点击界面上对应配置小节的“添加定制策略”,比如添加一个工作日策略,周一到周五让机器人 chargeNeed 低一点,周末就会采用默认的值,这样机器人工作日就可以有更多工作时间。
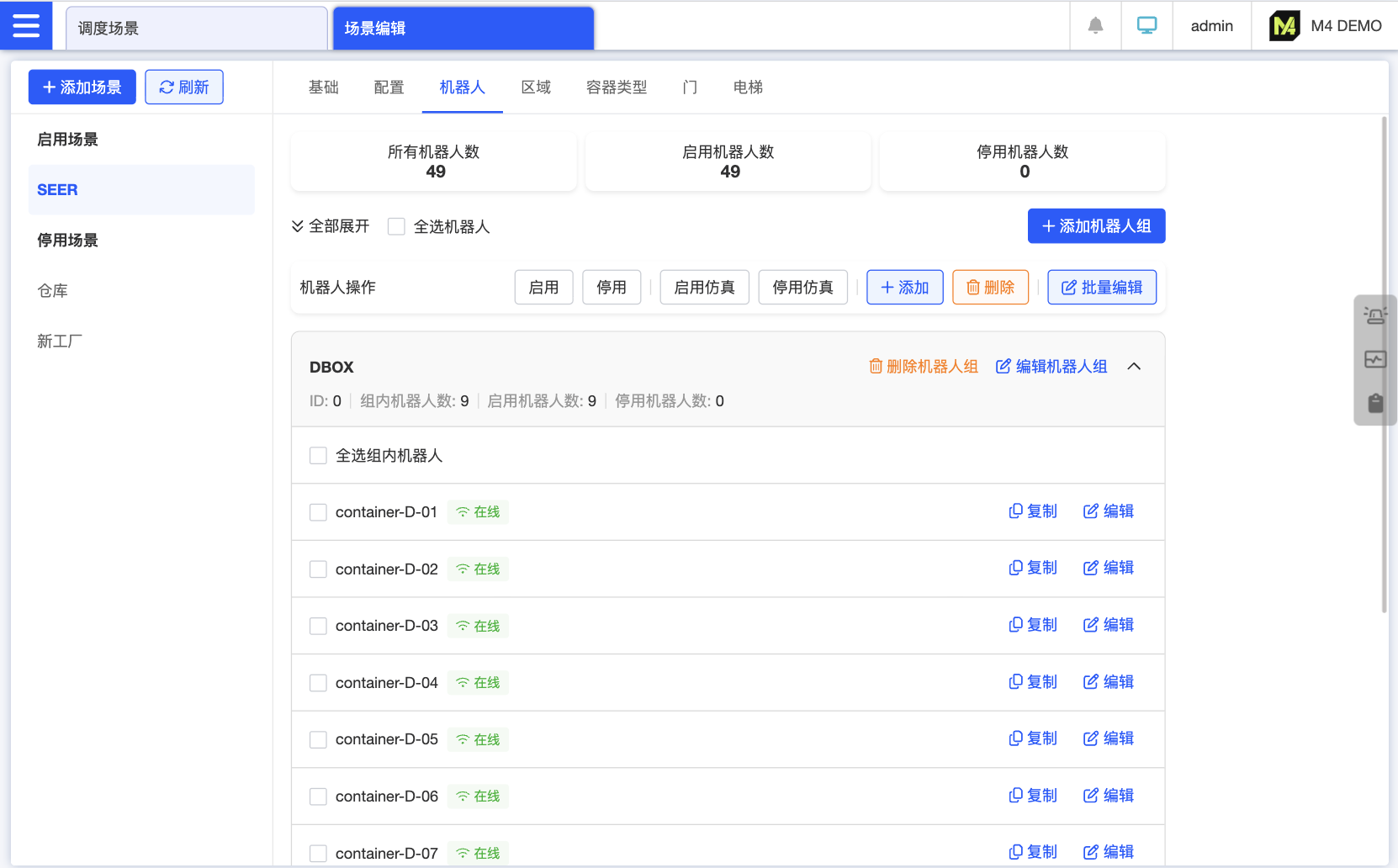
分组显示场景中所有机器人,支持批量添加、复制机器人,且支持勾选机器人后,点击上方的操作按钮,如“启用”、“停用”等,对其进行批量编辑。
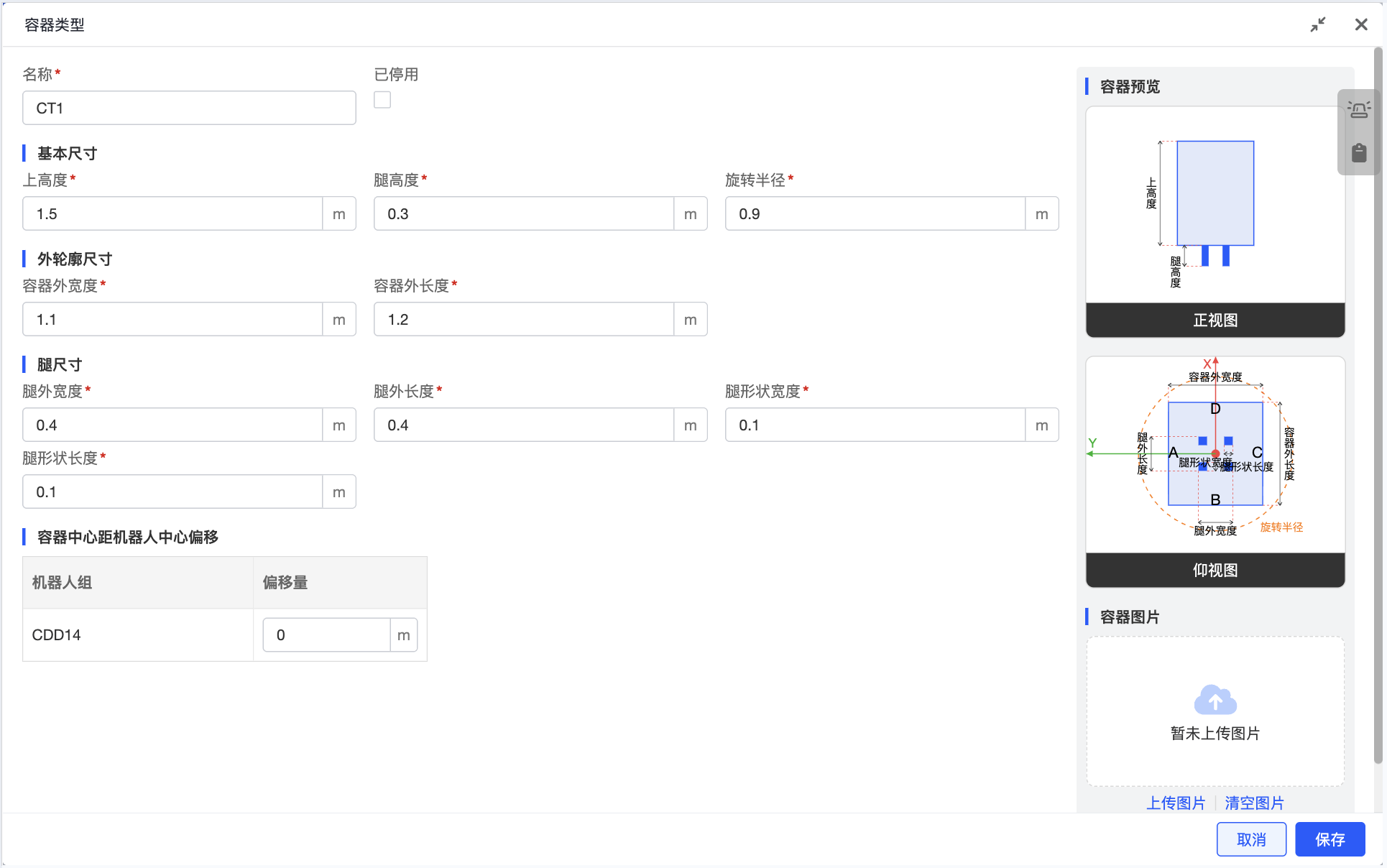
为场景添加容器类型,需要配置基本尺寸、外轮廓尺寸和腿尺寸,除这些基本参数外,如果容器不是放在机器人正中心的位置,那么还要配置偏移量。为了便于理解,配置值都包含默认值,且右侧的预览图会标识各个值的含义,图文对照,配置起来更容易。随着配置项的输入,右侧的容器预览将会实时变化。
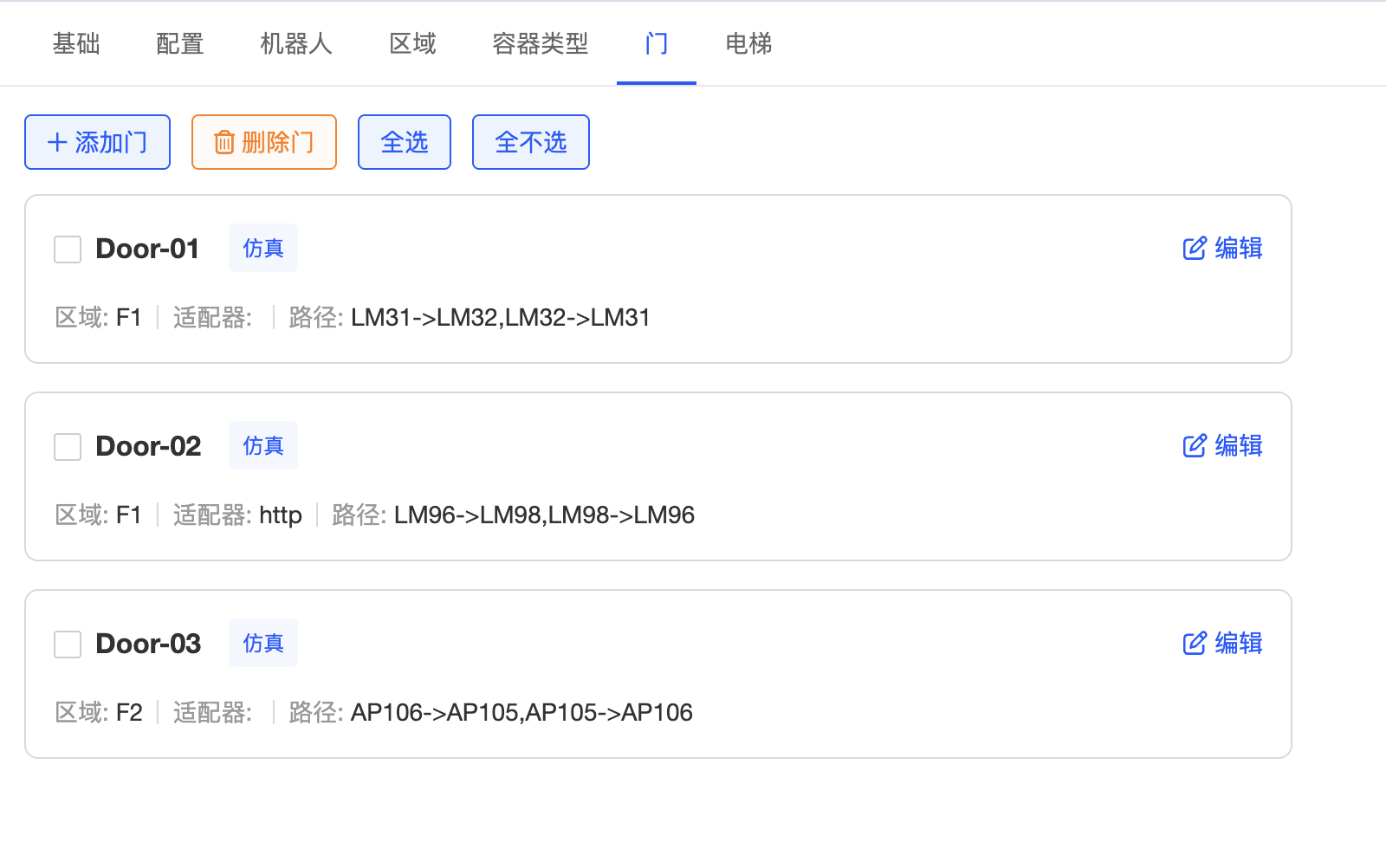
支持在场景中配置多个门,当配置完毕,卡片上可以看到门所处的路径和区域,如果是仿真,将有标识。
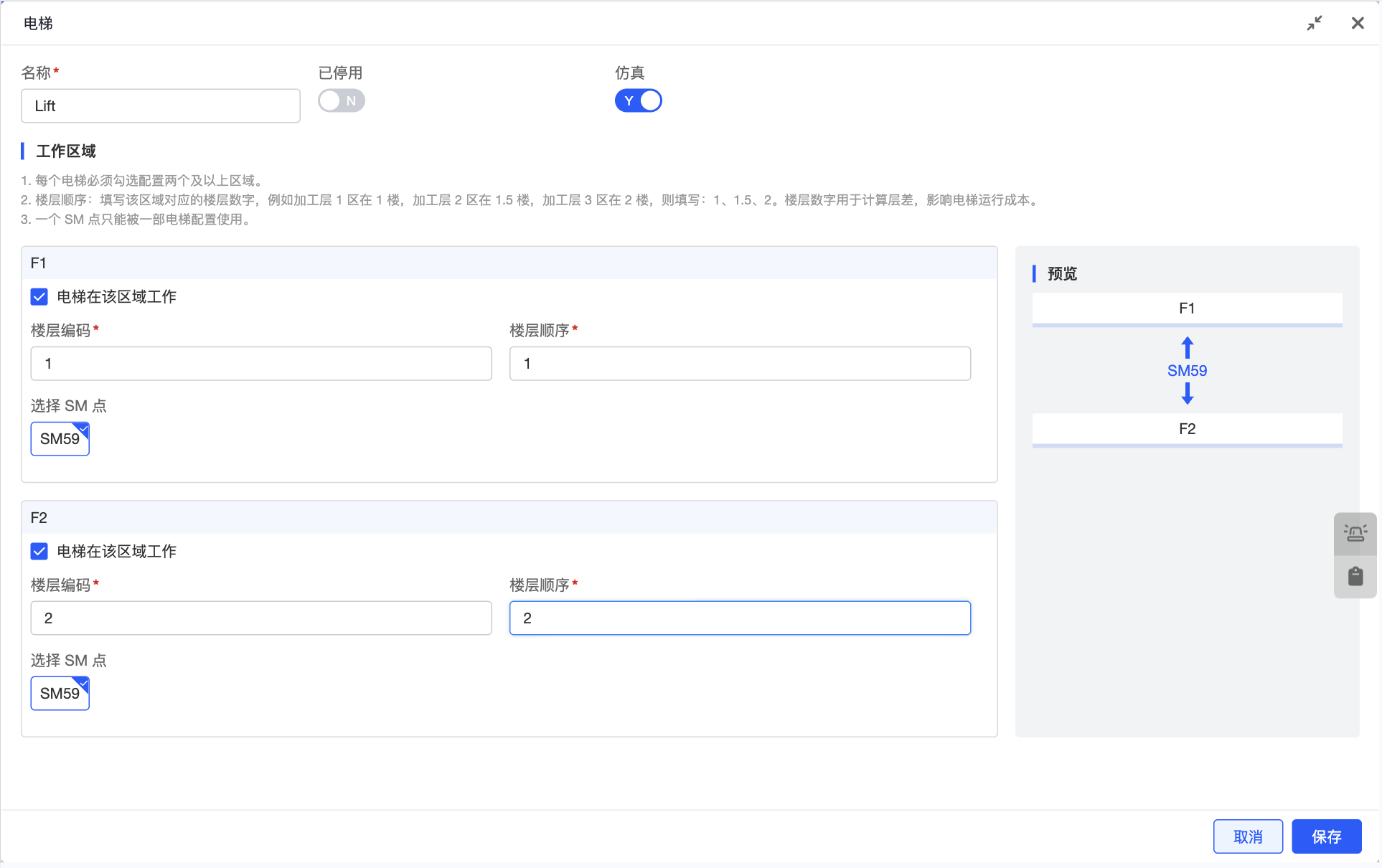
为场景配置电梯,勾选电梯所在的区域后,在区域内进行电梯的楼层编码和楼层顺序的配置,为其选择场景中的 SM 点,右侧的预览根据配置实时变化,模拟实际电梯的分布,更有立体感。
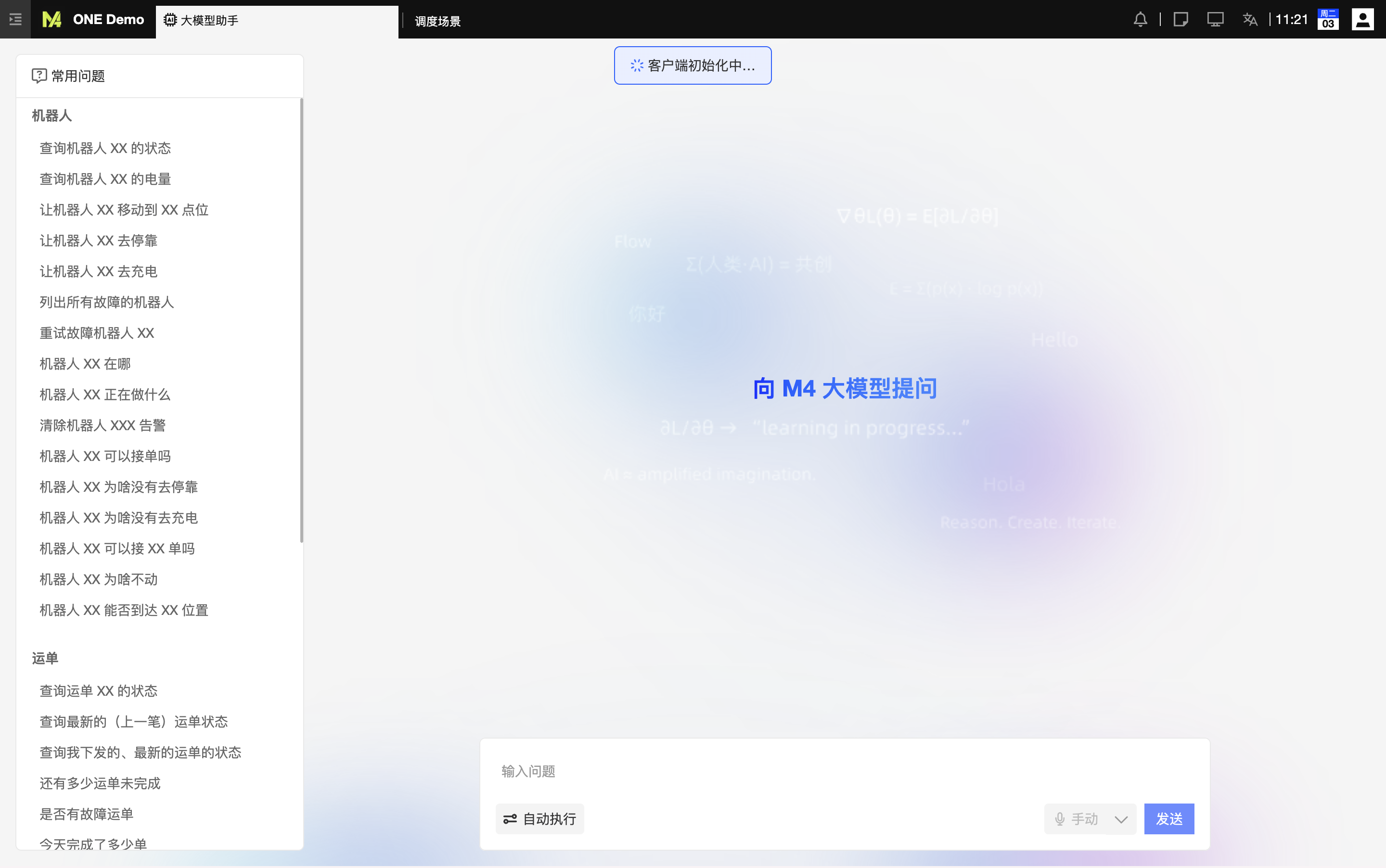
M4 AI 助手整体界面:进入 M4 AI 页面后,系统首先进行客户端初始化配置,初始化进程在页面顶部以气泡提示显示;界面中心呈现默认引导语,左侧侧边栏预置“常用问题”列表以辅助用户快速了解 M4 AI 助手的能力。在初始化未完成前,底部输入框处于禁用状态,确保大模型底座与机器人调度环境完成精准对齐。
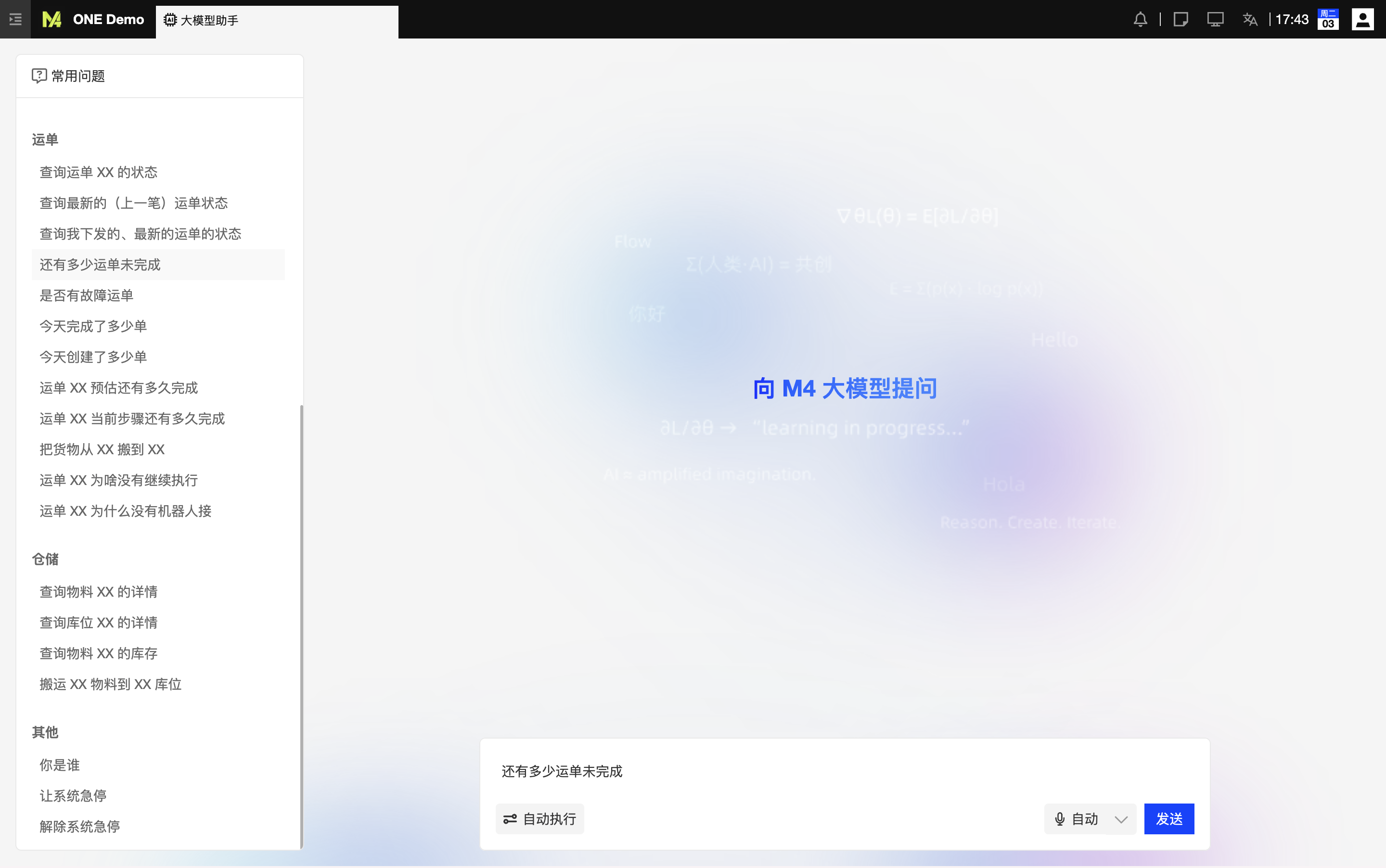
常用问题预设了工业场景中可能出现的高频问题,并按照机器人、运单、仓储等进行分类。用户选择列表的问题,对应指令便会自动填充至输入框。用户仅需修改指令中的关键参数(如机器人编号或点位名称)即可快速发起提问。这种“模板化输入”的设计大幅降低了交互门槛,实现了复杂调度指令的便捷下发。
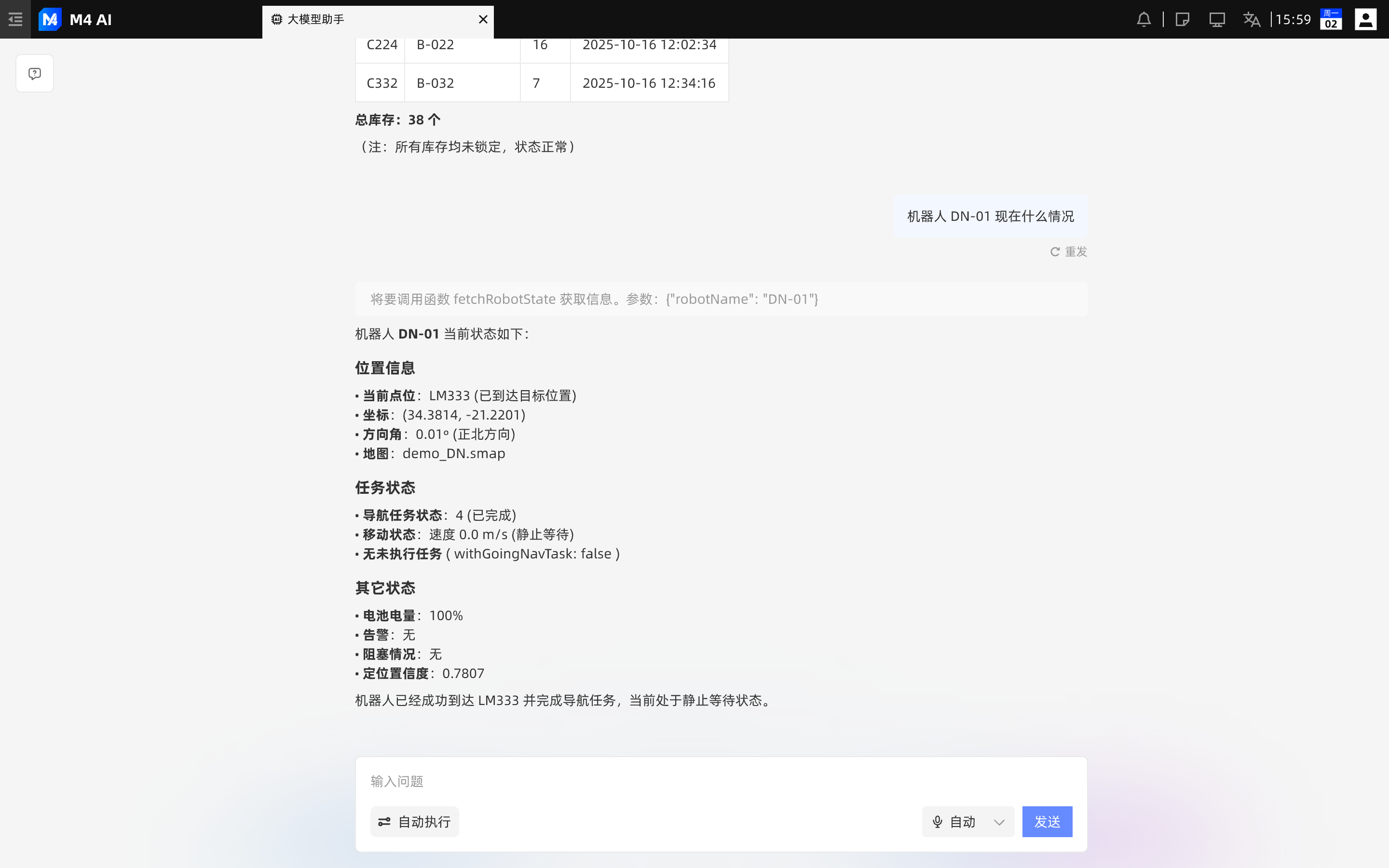
通过大模型的自然语言处理能力,用户可直接下达非结构化指令,查询机器人、运单、仓储等相关状态。系统在理解语义后,透明化展示底层函数调用过程,并将复杂的原始数据自动转化为表格、列表等易于阅读的格式,提升复杂信息的获取效率。

用户通过自然语言下达搬运指令后,系统将自动解析任务所需的关键参数如起点、终点、物料及任务类型等核心参数,并创建相应运单。该功能支持延时、手动、自动三种执行模式切换,满足不同业务节奏下的操作需求。

支持多模态输入,用户可通过语音指令与 M4 AI 助手进行自然语言沟通。语音识别功能提供了手动发送与自动发送两种模式:在“自动”模式下,系统将在语音识别完成后自动发出消息,大幅提升了工业移动场景下的操作效率。界面中心及底部输入框通过实时动效与文字提示反馈录音状态,确保交互过程的高响应性与透明度。
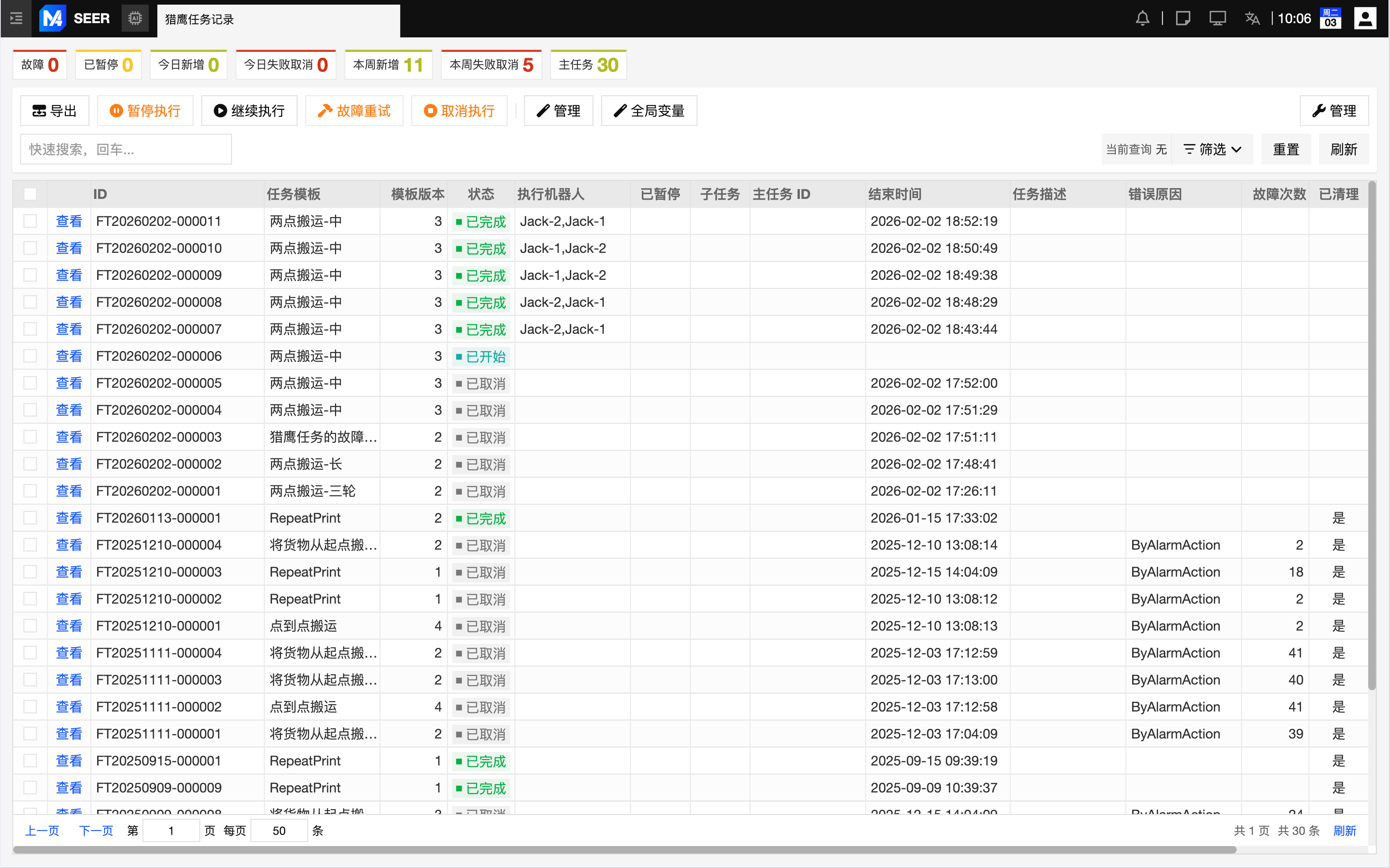
猎鹰任务记录界面:以表格形式展示并管理全部猎鹰任务。界面顶部提供任务状态汇总与快速筛选功能,支持对任务执行快捷操作,可一键跳转至模板管理与全局变量配置页面。
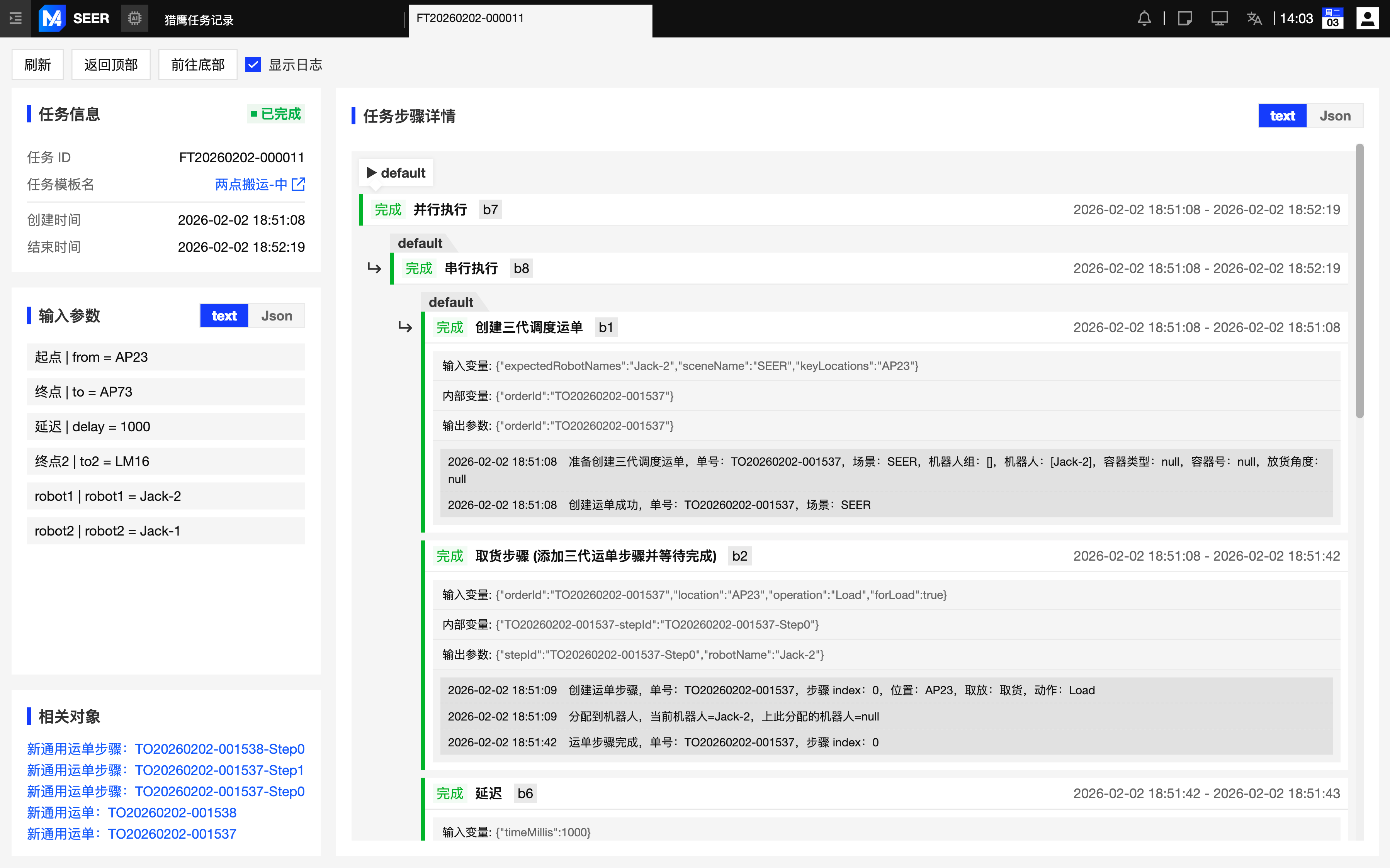
猎鹰任务详情界面:展示单个任务的完整详情信息,包括任务概览、输入参数、任务变量、关联对象及任务步骤明细。任务步骤支持查看完整日志,日志内容可在普通文本(Text)与 JSON 格式之间自由切换。
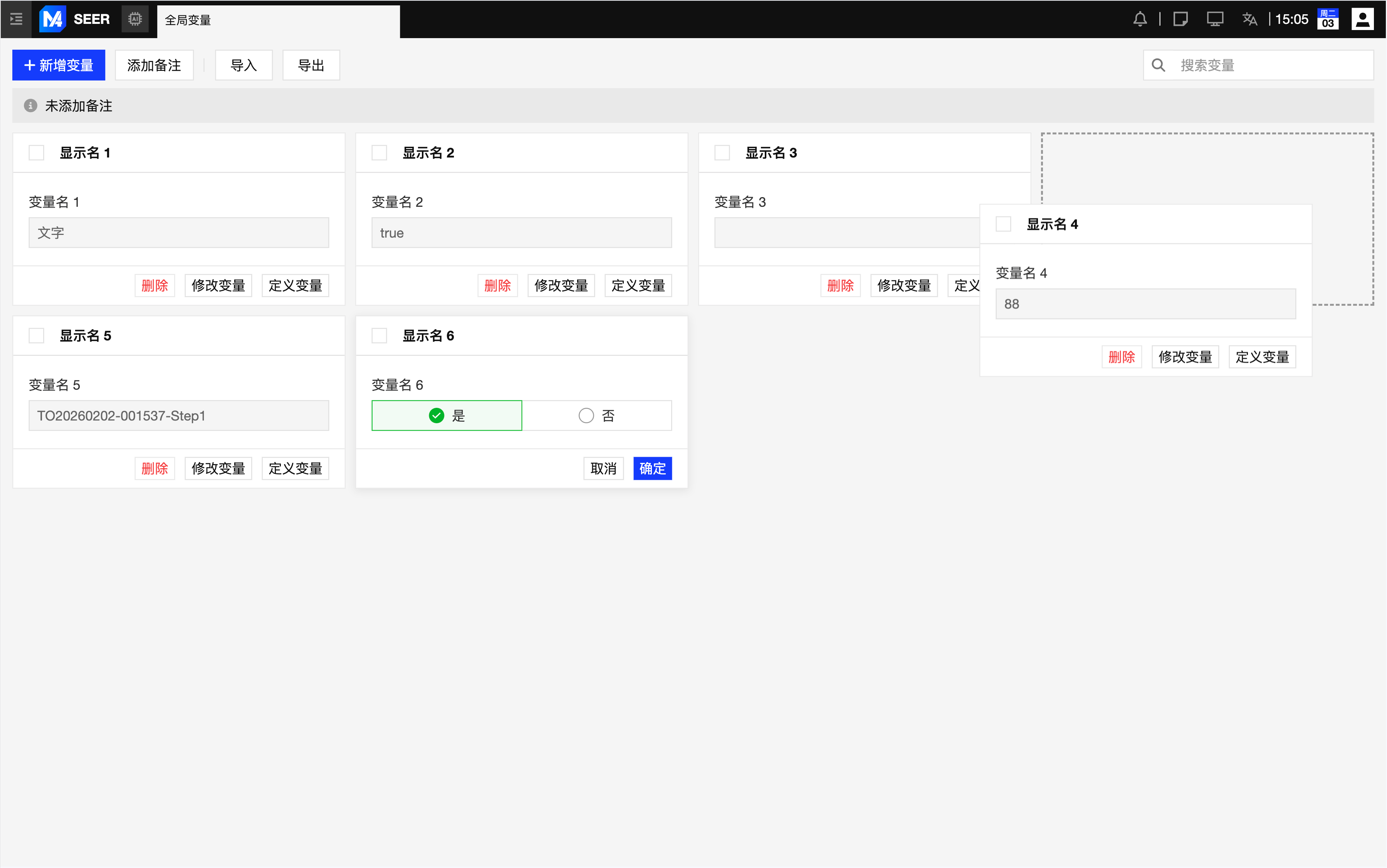
全局变量管理界面:以卡片形式展示系统全局变量,支持变量查看、值编辑、拖拽排序、导入导出与备注说明,区分管理权限与查看权限。
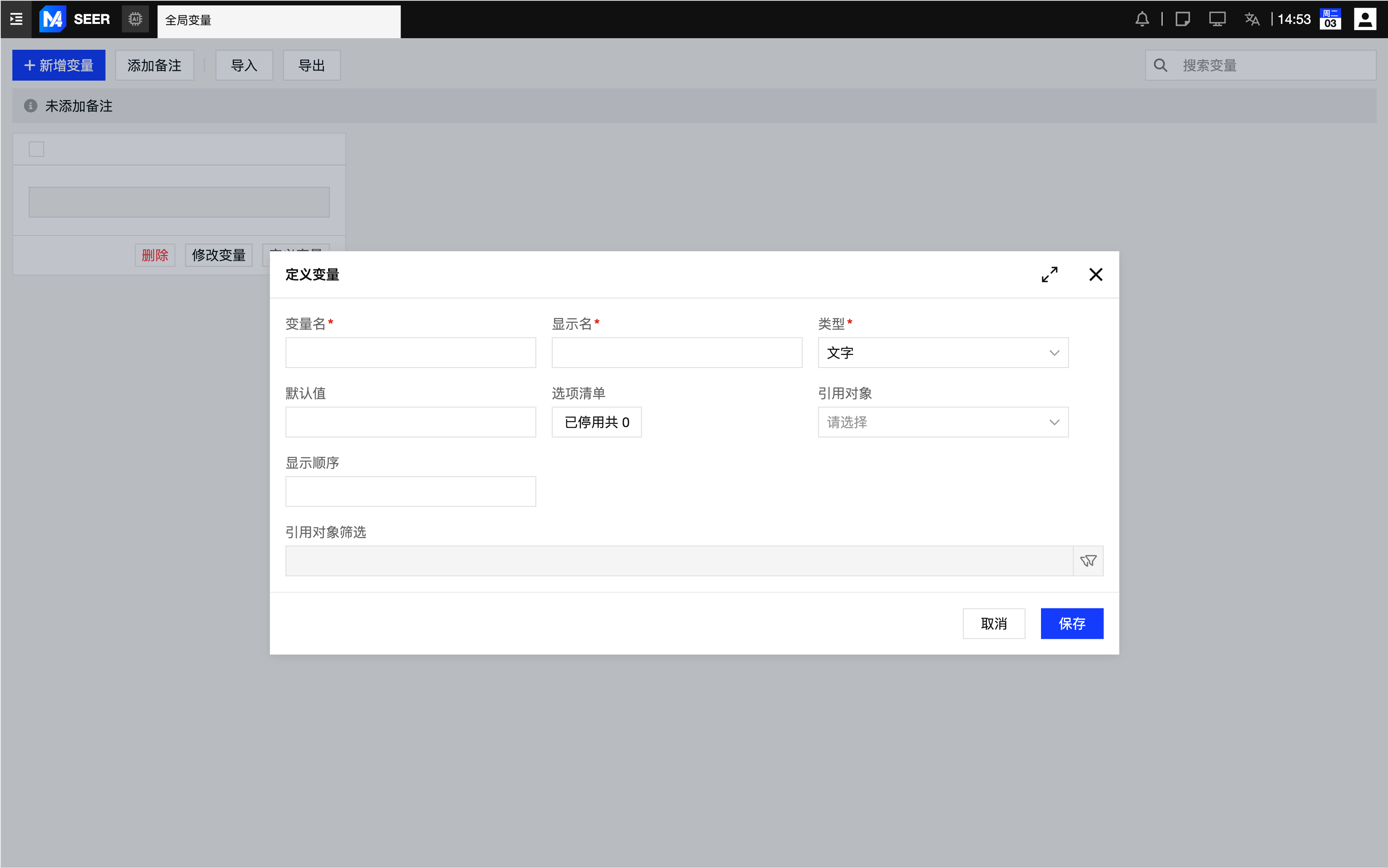
全局变量定义/编辑弹窗:用于新增或编辑全局变量,配置变量名、显示名、类型、默认值、选项清单与引用对象。
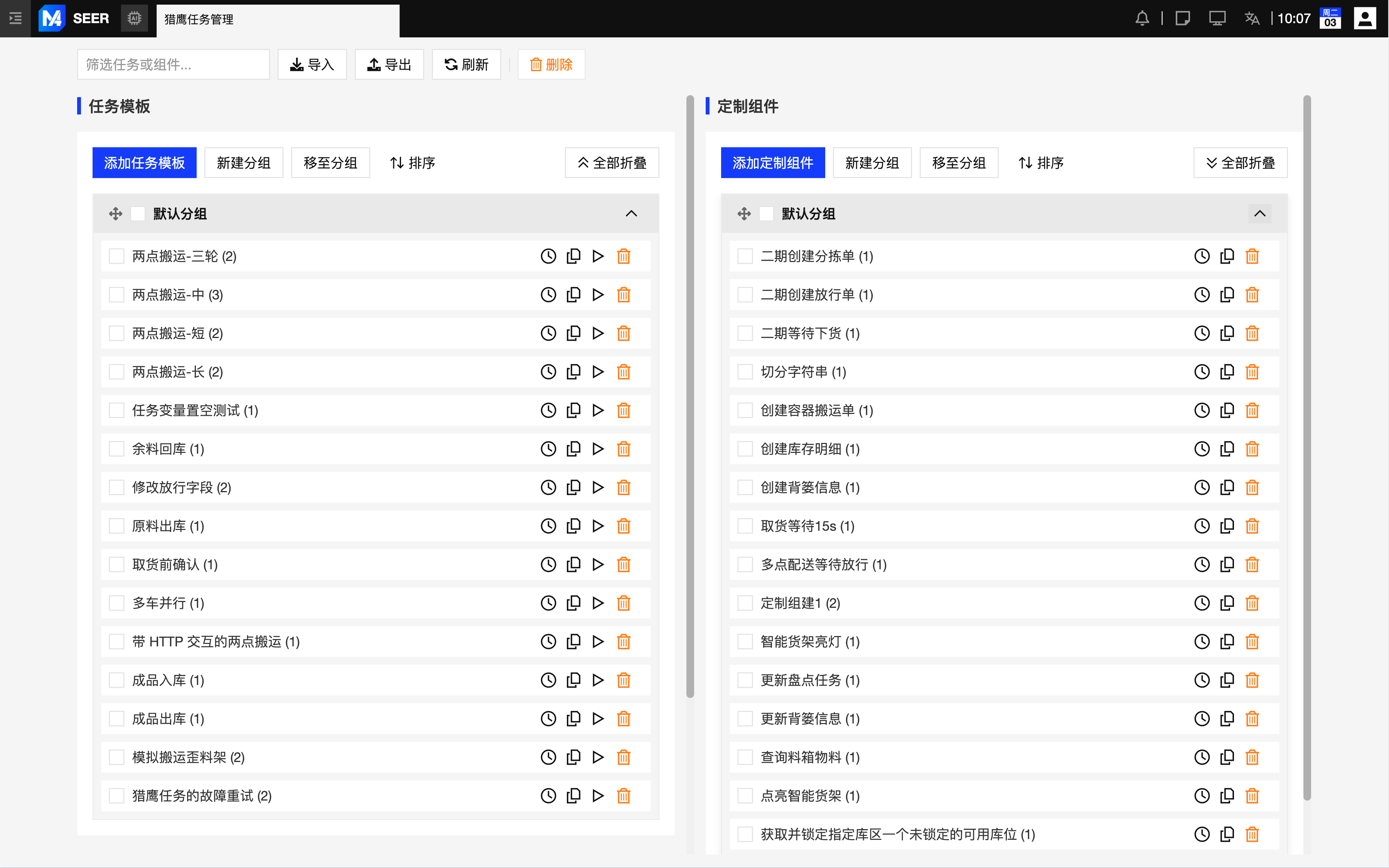
猎鹰任务模板管理界面:左侧为任务模板列表,支持可增删的默认模板分组、系统内建分组,同时支持自定义新增分组管理。右侧为定制组件区域,支持组件的新增、删除与分组归类。
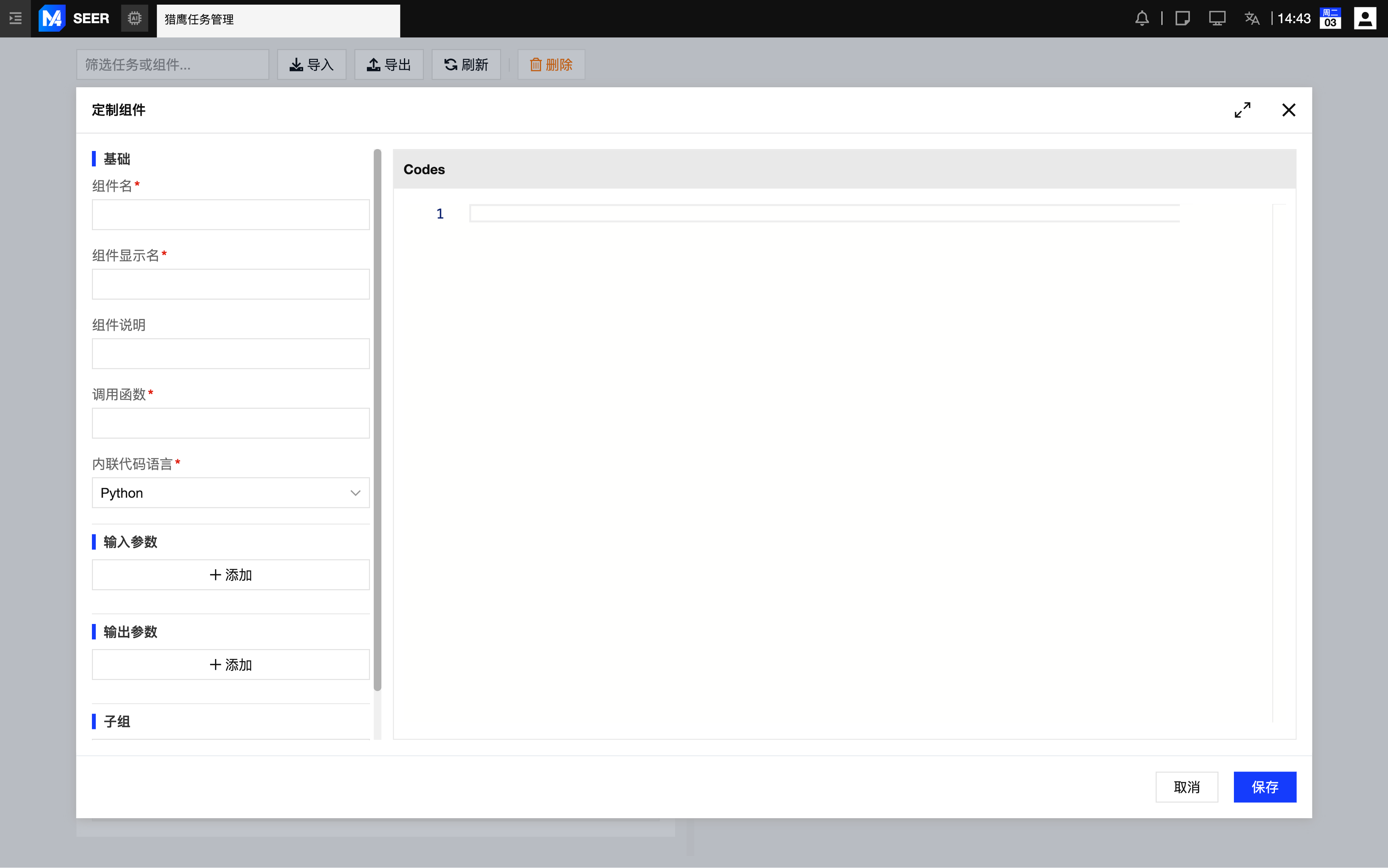
定制组件新增/编辑界面:用于定制组件的参数配置、逻辑定义与属性编辑,支持保存、版本管理与源码查看。
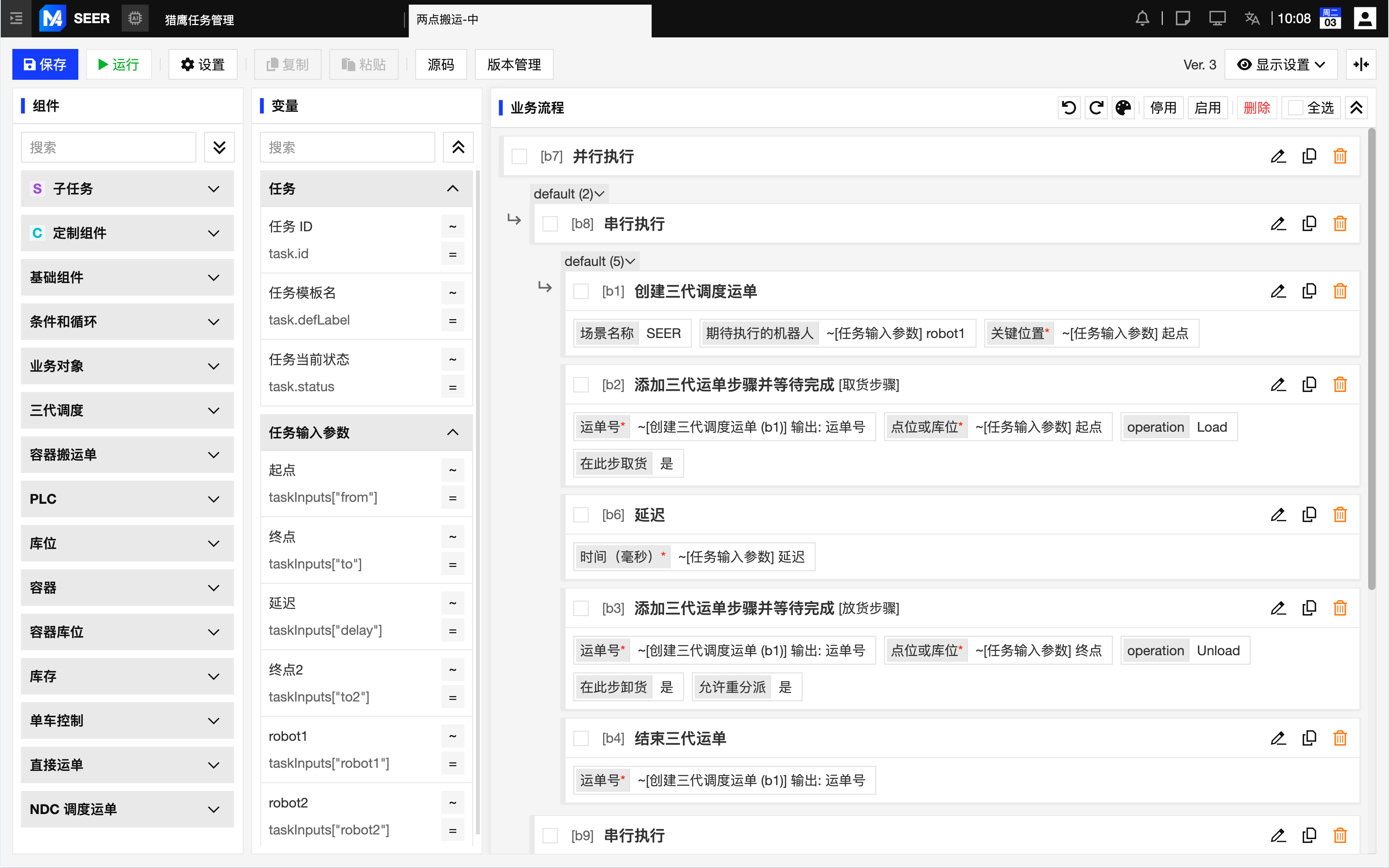
猎鹰任务模板编辑界面:左侧分为组件面板与变量面板:组件面板集成所有子任务、定制组件与系统内建组件;变量面板展示任务相关变量。右侧为流程编辑区,支持流程配置、编排与全量编辑操作,可高效快捷地完成任务模板创建与编排。
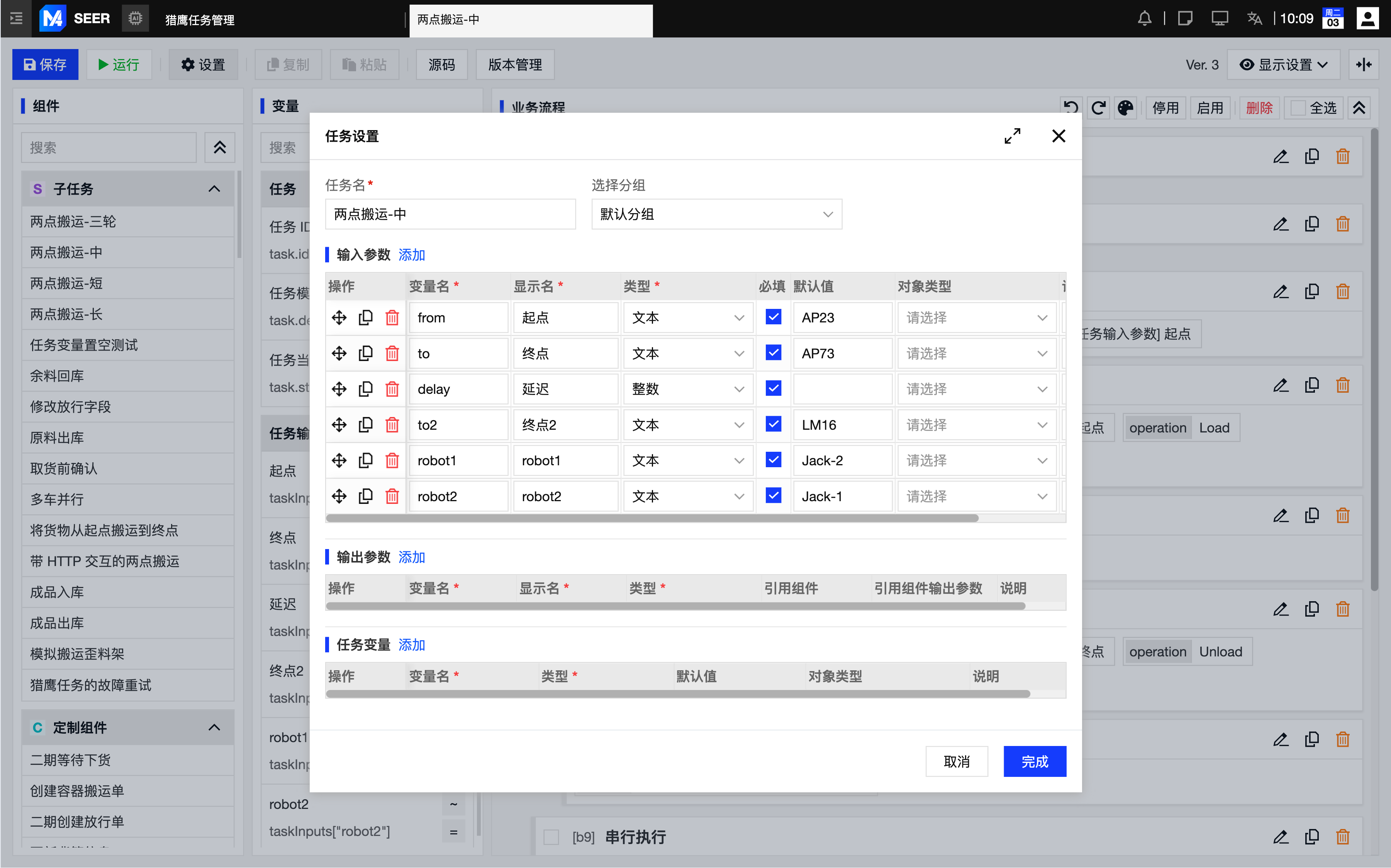
点击顶部“任务设置”按钮,弹出配置对话框,可修改模板名称、所属分组、任务输入参数、输出参数及任务变量。

任务运行弹窗:展示任务输入参数并校验必填项,自动记忆上次运行参数,运行完成后自动跳转至任务详情页面。
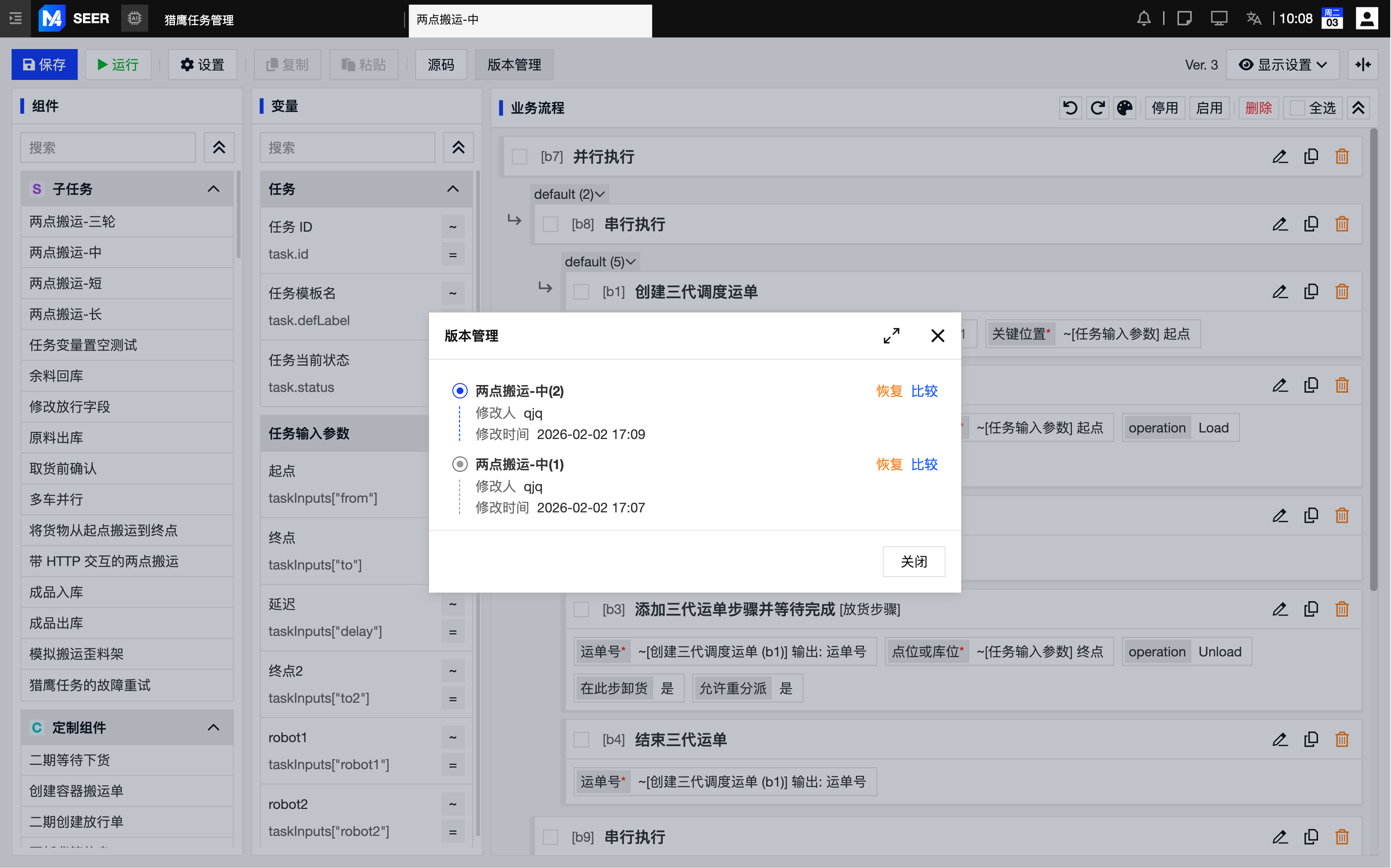
点击版本管理可查看当前任务模板所有历史保存版本,支持版本回溯与管理。
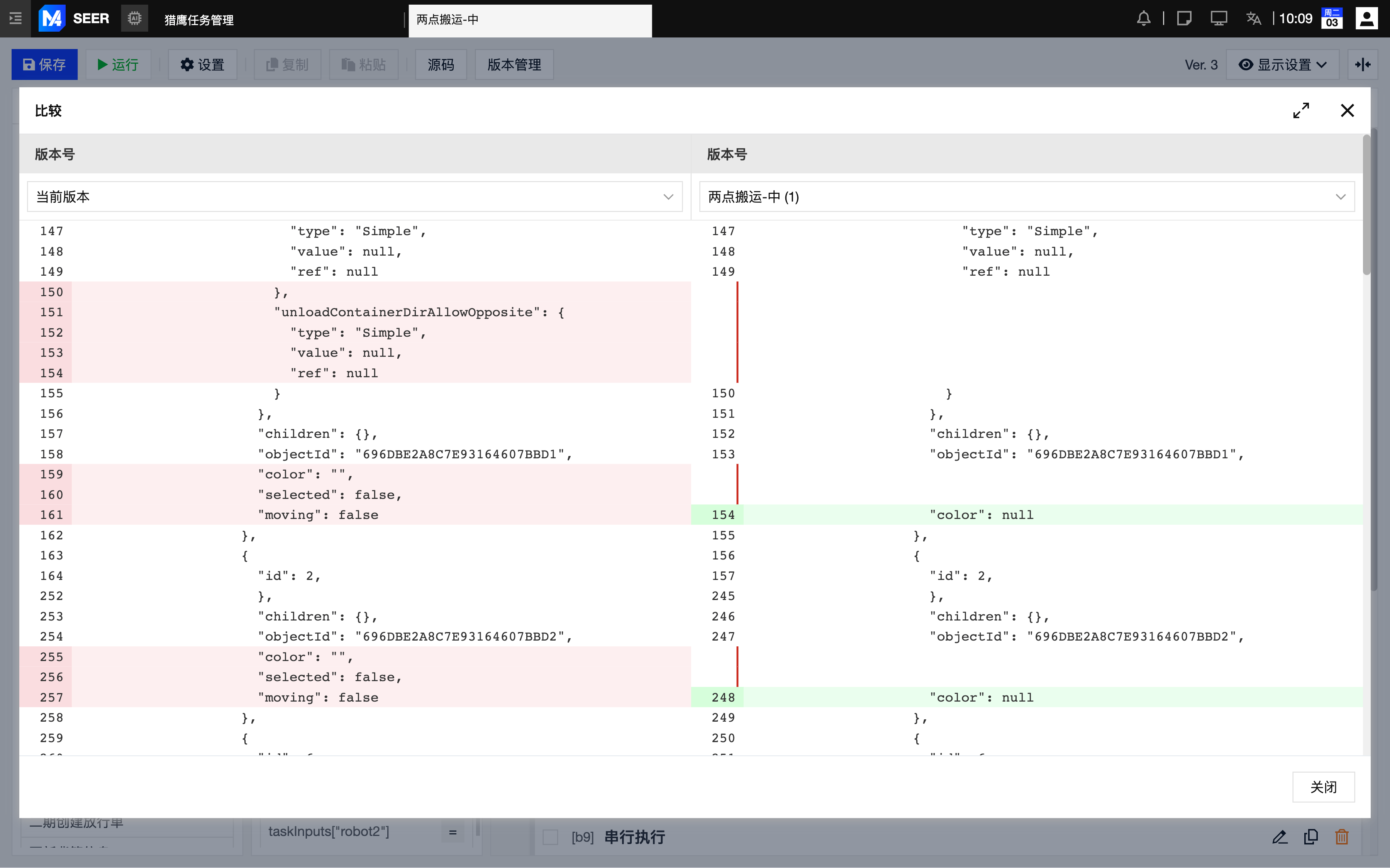
在版本管理中点击“比较”按钮,即可展示所选历史版本与当前版本之间的详细代码差异与内容对比。
Copyright © 2025 上海仙工智能科技股份有限公司